过程控制

要想把创新理论种在工业现场这片沃土,并生根发芽茁壮成长,就必须正视理想和现实的差距,找到跨越理想和现实之间鸿沟的技术路径。解决实际问题需要决心、勇气和智慧。企业要迎接新技术带来的机遇和调整,要重视生产过程和管理运营的自动化工作,要重视自动化人才培养

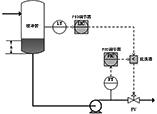
PFD(Process Flow Diagram,工艺流程图)和P&ID(Piping and Instrumentation Diagram,管道及仪表流程图)是化工、石油、制药、电力等工程领域中常见的两种技术图纸。它们在工艺设计、设备选型、安装调试和运行维护等过程中起着重要作用。1、PFD(工艺流程图)定义PFD主要用于…

制冷机组油温控制这种有多个变化的被控变量,和多个操纵变量时,先进控制实现这种多变量油温控制要简单的多、灵活的多、安全的多

文章《液位自动控制振荡问题的解决方法》分享了液位控制振荡的经验,本文从医生的视角再和大家聊聊液位控制振荡的解决方法。本文仍沿用《液位自动控制振荡问题的解决方法》中的案例。核心定律:稳定的控制系统如同健康的心脏,任何规律性振荡都是"心律失常"的警报信…

在精馏塔操作过程中,塔釜液位控制通常以塔釜采出作为主要调节手段。然而过程控制系统的复杂性在于,其始终存在特例工况的挑战:当塔釜采出呈现间歇性操作、微流量运行或受工艺约束需保持固定时,传统的液位-采出控制回路将失效。此类特殊工况下,需通过再沸器蒸汽流量调节、侧…
定义问题:任何有规律的振荡,都说明自动控制回路有问题。在上图的液位自动控制中,采用出料控制液位。由于来料较少,而且PID参数不合适,调节阀一直在从全关到某个输出之间振荡。工艺人员根据物料平衡,将PID控制器输出范围限制在[-5 3],然后又减小到[-5 1]。通过控制器输出…

过程控制(Process Control)和离散控制(Discrete Control)是自动控制系统中的两种主要控制方式,它们分别应用于不同的工业场景。以下对过程控制和离散控制详细讲解,以及对比分析它们的主要区别

案例来自《Process Control-Engineering Analyses and Best Practices》:一个水处理过程,水被送到FWKO罐,然后流到气/液分离器,去除水中的夹带气体。然后水被送到下游进一步处理。流量由流量PID控制器调节。操作要求是通过操纵两个流量控制阀来维持两个液位。液位和流量测量…
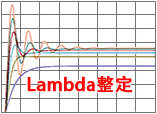
使用Lambda整定方法整定PID参数行之有效,仪表工学习Lambda整定方法可以按照本文分享的步骤逐步进行

液位控制系统、压力控制系统和流量控制系统进行串级控制时,容易发生振荡。概要一次控制系统和二次控制系统的固有振动周期相近时,容易产生振荡。此时,使一次控制系统的速度慢于(延长固有振动周期)二次控制系统的速度,便能有效防止振荡。即由一次系统改变二次系统的目标值,…

使用冷水和热水混合同时控制水温和水量,热水调节阀和冷水调节阀是两个MV,水温和水量是两个CV。上图左边是两个单回路,右边是22的先进控制方案。当没有约束时,两种控制方案是等价的。如果非要找点不同,在设定值变化时,两个单回路会互相影响。而先进控制则可以同时考虑两个…

GDS的作用是检测泄漏,探测器设置是以泄漏到大气环境中的介质浓度为依据的,不是以管道内的介质成分为依据。煤气中含有多种有毒气体,探测器设置应该以测毒为主,如果煤气泄漏后大气环境中HS的浓度也可能超过阀值,建议同时测CO和HS,其他组分毒气可不检测

当使用PID设计控制方案时,为了保证至简至优,会强调MV的从一而终。MV控制权的切换会增加方案的复杂性,但是收益有限。简单方案的适用范围是有限的。嵌套控制方案,无论是设计难度还是理解难度都很大。当使用APC进行控制时,变量和模型不变,仅仅通过控制要求和参数的不同就能…

在精馏塔控制中,实现物料平衡、维持操作条件、保证产品质量是根本。所以物料平衡、能量平衡、防止漏液和液泛是需要考虑的控制方案。精馏塔温度控制是精馏塔操作的锚点,有了温度控制精馏塔就不会工作点漂移。温度控制也可能有各种问题

根据闭环阶跃响应曲线,能看出很多PID参数整定相关的知识,能看出趋势背后蕴含的知识,就可以减少开环测试时间提高效率
对汽油加氢装置的操作数据进行分析时,发现反应器进料操作工需要频繁调整。这说明原来的控制方案不符合实际的操作习惯。原设计的控制方案如下图所示。FIC是反应器进料,一般要尽量保持稳定。缓冲罐的进料受到装置负荷,进料组成的影响具有不确定。为了实现这个工艺要求,同时防…

什么是控制回路的同相位振荡?当一个控制回路投自动时,表现出有规律的振荡。有三种的情况:1、非线性振荡过程变量方波,PID控制器输出锯齿波。这是PID控制器输出非线性造成的,消除非线性是此时的首选。消除方法包括工作点移动、调校定位器、维修或更换等;2、异相位振荡当PI…
PID诞生记节选自白志刚《自动调节系统解析与PID整定》,分为中国古代的发明、没有控制理论的世界、负反馈、控制论、PID、调节器等章节,展现了PID的发展历程

均匀控制系统大多采用简单控制、串级控制、双冲量控制三种不同的形式,其实现方法和所用设备也类同于这三种控制系统,故障检查及处理方法可参考昌晖仪表网“过程控制”栏目介绍的这三种控制系统

安全栅属于电动单元组合仪表的辅助单元,其主要用途是防爆系统的隔离装器置。安全栅将来自危险区的信号经隔离变送,输出隔离的电流信号到安全区,安全栅应用在本安防爆系统中,通过限流和限压电路限制了送往现场回路的能量,从而防止非本安电路的危险能量串入本安电路。

温度控制是能量平衡的表现,而且往往是需要严格控制的工艺参数。温度被控对象本身的响应速度比较慢,干扰也很多。有的温度控制需要精细的调整温控器PID参数,有的必须采用复杂的变结构PID控制策略,有的需要重新定义问题例如选择灵敏板温度或者选择温差控制,甚至有时候必须把…

笔者认为:在单变量控制问题上和PID比较,和历史上的其他算法一样,AI应该不会有太大的优势。用AI控制pH更多是技术可行性。用AI提高人类的劳动效率,并不是替代成熟的解决方案,而是找到原来存在问题的解决方案进行升级

PID控制的难点不在于技术,而在于艺术。要从会用PID到用好PID,需要的不仅是知识,更是实践和思考。正如辛斯基所言,过程控制更像是一门艺术。这种艺术性不是天生的,而是通过长期的积累和反复的实践获得的。对于每一个想要深入掌握PID调节的人来说,或许最重要的就是保持对细…

哪些仪表需要设置电涌防护器?回答这个问题要分两个步骤:首先按照SH/T3164-2021第5章的规定判断是否需要实施仪表防雷工程;其次,如需要实施仪表防雷工程,则设置电涌防护器。反之,则不设置电涌防护器

可燃有毒气体报警器总线轮训、断线及丢包等等问题,严重干扰GDS系统的正常使用,节省电缆费用的同时,严重削弱了GDS应有的保护功能。随着各级部门监管的深入,GDS系统总线方式基本已经杜绝。不涉及到重大危险源的可燃有毒气体报警器可采用总线方式,但是涉及到重大危险源的GDS…

采用4:1和10:1衰减曲线法整定调节器参数时应注意以下几点

精馏塔分离原理是利用混合液中各组分的相对挥发度不同(沸点不同),即在同一温度下各组分的蒸气压不同这一性质,使液相中的轻组分(低沸物)和气相中的重组分(高沸物)互相转移,从而实现组分分离的目的

在选择性控制系统中防止积分饱和的方法有三种:限幅法、外反馈法和积分切除法,本文简单介绍这些具体方法

控制质量的好坏与组成控制系统的四个环节的特性有关,当系统工作一段时间后,这四个环节的特性都有可能发生变化,以致影响控制质量。所以控制系统在运行一段时间后,往往要对调节器的PID参数重新进行整定,以适应工况的变化,满足对控制质量的要求

昌晖仪表以流量的加法运算、比值运算、气体流量的温度压力补偿等运算中使用数学运算器为例分享数学运算器系数设置方法

文章简单介绍Honeywell DCS控制回路PID参数整定方法

拉普拉斯变换是解决工程问题的强大工具,它提供了一种在频域内分析和设计系统的方法。通过拉普拉斯变换,复杂的时域问题可以转换为更易于解决的代数问题。拉普拉斯变换在自动化控制领域中的应用场景也是非常广泛的,主要体现在以下几个方面

仪表工程师能够解决的常见过程控制问题包括:1、明明已经有了非常确定的操作逻辑,但是仪表工程师没有使用顺序控制,把这部分知识自动化。明明已经有了顺序控制,但是工况变化后没有及时更新,导致操作工只能频繁手动操作。说到底缺少共情之心,既对操作工的知识不重视,又对操…

很多时候看专家进行PID参数整定,感觉很容易就能解决问题,但是之前自己做了很多努力也解决不了,Lambda整定方法失灵了。是Lambda整定方法有问题吗?是不是专家有所保留?其实都不是。这是典型的知易行难,知识学习有难度,应用知识解决实际问题更有难度

现场过程控制问题的解决是分层次有套路的,需要找到根因,有的放矢、至简至优。本文分享解决过程控制问题的流程,希望对仪表从业人员有所帮助

控制方案设计是解决问题的方法。而复杂控制是PID的扩展,和PID一样是控制方案设计要灵活运用的工具。所以所谓的复杂控制方案设计其实是两件不同层次的事情,不可混淆
如果工艺设备设计非常充分都符合理论计算,往往单回路就能解决问题,工程师掌握PID参数整定就足够了。就是因为存在需求、约束和条件的综合制约,才需要控制工程师这个岗位。纯滞后和复杂工况是过程控制存在的前提。要把认知能力和技术水平和实际情况结合起来,要把复杂问题拆分…
本文将探讨过程控制方案中的四个原理:工艺原理、设备原理、操作原理和控制原理。理解并确保这四个原理的一致性,对于实现整个控制方案的合理性、有效性、稳定性和安全性具有决定性作用
为过程控制的教材的案例,往往都是侧重某一部分的练习题,肯定不是实际工艺设计。为了突出控制方案,必然要做必要的抽象和简化。如何才能从控制方案简图中获得教材希望传达的信息呢?工艺流程和控制要求又是什么呢?本文讲讲如何理解控制简图

零手动操作是个持续改进过程。零手动操作不是一个项目也不能简单依靠第三方公司实现,需要工艺、设备、电仪、控制的全员参与。“理想主义凝聚人心、现实主义采取行动”,以零手动操作凝聚人心,以操作管理采取行动,坚持始终抓主要矛盾的工程方法。强调向操作经验要知识,现时…
过程控制改进的工程方法可以考虑:定义被控变量并配对;确定控制方案;性能改进、组态实施及整定

信号选择器的功能主要是从两路信号中选择一路作为输出信号,输出控制方式包括自动高选、自动低选以及通过外部开关量或电平信号控制选择一路输入信号输出。信号选择器在工业控制中有着广泛的应用,尤其是在安全保护控制系统中
位精通理论与实践、具备创新能力的过程控制工程师培养是一个高度专业化且涉及广泛知识体系的过程,旨在培养能够解决复杂工业过程控制问题、推动技术创新和优化生产效率的高级人才。以下是一些关键要素

在现行国家标准《石油化工可燃气体和有毒气体检测报警设计标准》GB/T50493-2019中,对甲类气体和液化烃、甲B 、乙类可燃液体化后形成的可燃气体或其中含有少量有毒气体和一氧化碳、氯乙烯、硫化氢、氯气、氰化氢、丙烯腈、二氧化氮、苯、氨、碳酰氯、二氧化硫、甲醛、环氧乙烷…

Tore认为PID和APC是永恒的话题,而且也只有APC和PID从发明到现在一直被工业界应用,APC已经有40多年的工业应用历史了,PID更是长达百年。Tore认为单变量PID够强,多变量APC占优,两者不是竞争关系而是合作关系。PID和APC各安其位、并行不悖。能和PID并行不悖是对APC的最高评价…

本文将考察当前流程工业现场设备、数据内容、传输要求等。在此基础上,本文提出流程工业现场数据传输网构想,为建设新一代流程工业现场数据传输高速公路提供选项

符合IEC61784-3的数字通信型仪表符合相关标准和安全等级要求,能够有效保护装置安全运行,可以用于安全仪表仪表系统。现行国标中不应使用现场总线或者其他通信方式仪表的规定与现有技术发展水平有差距,未能充分利用新技术发展带来的能力,希望未来的标准修订能够有所改进
工业界流行试凑法整定PID参数可以从简单性、成本考虑、经验重要性、对PID缺乏深入理解、即时解决、传统习惯和适应性七个方面区理解。试凑法整定PID参数也有其缺点,例如可能不够精确,无法保证最佳的控制性能,并且可能需要较长的时间来达到满意的结果

先进控制强调控制策略的高级性和复杂性;优化控制注重性能指标的最优性;智能控制则借助人工智能技术实现更智能灵活的控制
在《可燃气体检测报警器》(JJG693-2011)标准的5.5条规定:“可燃气体检测仪器的检定周期一般不超过1年”;第5.4条规定:“按本规程要求检定合格的仪器,发给检定证书”







