技术文章

电气图形符号和电气文字符号方便用户查阅、设计电气图纸,昌晖仪表制造有限公司依据最新国家标准、IEC标准,整理了电气图纸设计中最常见的电气符号与大家分享。图纸是工程师的语言!在中外合作项目上,可能语言不通,但通过图纸仍可进行技术交流。主要原因是图纸采用国际通用的…

PID控制中有P、I、D三个参数,只有明白这三个参数的含义和作用才能完成控制器PID参数整定,让控制器到达最佳控制效果。昌晖仪表在本文给大家介绍PID控制中P、I、D参数的作用。 比例作用比例控制器实际上就是个放大倍数可调的放大器,即△P=Kpe,式中Kp为比例增益,即Kp可大于1…

洗眼器是当发生有毒有害物质喷溅到工作人员身体、脸、眼或发生火灾引起工作人员衣物着火等紧急情况下,暂时减缓有害物对身体的进一步伤害,为专业医疗救助争取一定时间的紧急设备

在多年的实施DCS项目中,见过不少被操作员吐槽的DCS操作画面,问题的根源在于没有从操作员视角来设计DCS操作画面!本文分享别把P&ID直接当操作画面、用Pen工具画动态曲线、擅用动态图形、做好报警管理和报警分级和保证多台操作站画…

昌晖仪表生产精度等级为1/10B级、1/5B级、AA级、A级和B级Pt100铂电阻和温度标准器标准铂电阻温度计,按照JJG 229-2010规定,本文提供的Pt100精度与误差一览表供大家在铂电阻选型时参考使用

每当有一个新工程需要建设时,工程技术人员和采购人员都为待采购的低压开关设备是否能满足现场条件和要求而忧心忡忡,他们总觉得需要考虑的问题太多。本文来探讨和解答这个问题,给大家提供一些思路。

软测量(Soft Sensor)就是以易测的过程变量为输入,通过数学模型实时计算出难测的目标变量,相当于一套运行在计算机里的“虚拟仪表”

每台艾默生AMS TREX设备通讯器出厂都是未激活的,需要用户自行完成激活。AMS TRE的激活,升级及今后购买APP等都是需要与软件Upgrade Studio配合使用的,为了方便今后TREX的使用,建议尽早注册Upgrade Studio的使用账号

《液化石油气供应工程设计规范》GB51142-2015第9.3.5条原文:9.3.5 液化石油气储罐接管安全阀件的配置应符合下列规定:1 应设置安全阀和检修用的放散管;2 液相进口管应设置止回阀;3 储罐液相出口管和气相管应设置紧急切断阀;4 储罐所有管道接口应设置两道手动阀门;排污口两…

有客户问:我们这装置要不要上APC?本文把APC选型逻辑和APC选型建议结合真实案例数据分享给大家,看完你就知道装置要不要上APC了

因钢厂轧机、电弧炉和光伏光伏逆变器都在产生谐波,SVG自带的谐波治理功能不够,本文聊聊钢厂5MW光伏并网项目应采用带谐波治理功能SVG+APF组合的原因

温度传感器、温控器、电力调整器和加热管四个环节配合才能实现精确、稳定的温度控制。温度传感器负责感知,温控器负责决策,电力调整器负责调功率,加热管负责产热,四个环节彼此分工,又环环相扣的配合,温度控制系统就是这样让温度稳定在设定值上

压力变送器膜片直接与被测介质接触的核心部件,其材质与结构的选择,直接决定了测量的精度、可靠性乃至设备的使用寿命。本文将从材质与结构两个维度,系统梳理常见压力变送器膜片的类型并结合昌晖YR-ER100系列压力变送器加以说明,以期为相关从业人员提供参考
通过单晶硅差压变送器和金属电容式差压变送器静压影响试验,得出结论:金属电容式差压传感器由于其本身的结构特点决定,其静压影响误差不可消除或明显减小。只有通过静压补偿或采用硅差压传感器原理,才可实现较小的静压影响误差
无源滤波器选型需要关注调谐频率、电容器额定电压、电抗器耐流三个参数,这三个参数只要有一个不对,结局就是所安装的无源滤波器没发挥作用,或者谐波没滤掉,还添其他麻烦。昌晖仪表在本文将无源滤波器选型的三个关键参数给大家讲清楚,让你无源滤波器选型不踩坑

六种场景的接地电阻最低合格值:容量100kVA以上变压器中性点接地电阻≤4Ω;容量100kVA及以下变压器中性点接地电阻≤10Ω;重复接地(PE线)接地电阻≤10Ω;防雷接地接地电阻≤10Ω;联合接地(屏蔽系统)接地电阻≤1Ω;保护接地(一般电气设备)≤4Ω
一句话理解仪表不确定度:不确定度是对测量结果可信范围的量化
防爆电缆、金属导管、电气设备外壳依靠螺纹紧密咬合形成连续导电通路,及时释放作业、介质流动过程中产生的静电。而生料带绝缘性极强,缠绕在螺纹之间会彻底隔离两段金属构件,切断等电位连接通道。静电没有导出来是什么样的后果,不用说大家都知道。很多措施比如 法兰跨接 等…

YR-ER101单晶硅差压变送器/YR-ER10单晶硅压力变送器昌晖仪表采用瑞士原装ROCKSENSOR压力传感器和电路生产,用于测量液体、气体或蒸汽的液位、密度及流量,然后将其转变为4-20mA+HART电流信号输出。本文介绍昌晖单晶硅压力变送器关于参数修改的具体操作方法

在电工整个职业生涯中,要处理无数次故障,其中百分之八十故障集中在跳闸、发热、接触不良、绝缘老化这四类问题上。昌晖仪表在本文聊聊电工常遇到的四类故障问题及处理方法,希望对刚入行的电工有所帮助
解决控制问题的三个常用方法:PID参数整定、信号处理和方案设计。它们分别从怎么控、看什么和调什么三个维度入手,构成了控制工程的基本工具箱
写PLC程序,新手容易忽略一个问题:为何手动模式和自动模式不能混写?这里先给出答案:手动模式和自动模式的逻辑边界必须清晰,PLC程序中手动按机构写,自动按流程写;手动和自动只提请求,输出统一管理;模式切换必须处理好。

自动化项目验收时,客户往往要求厂家提供PLC程序和密码,此时大家都有顾虑。昌晖仪表的观点是PLC程序交付以项目前期约定的交付边界来分层交付,并提供完整资料和做好PLC程序版本备份
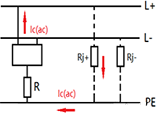
本文分析了采用IT接地形式的直流配电系统中绝缘监测方法,实际直流系统运行中的各类电磁干扰和电压波动均会影响绝缘电阻的测量值, 同时IMD与工作地间的电阻参数及注入电流的工作频率和最大幅值也会影响到直流系统及设备的运行安全,所以对应IMD的选用还是应以符合电气安全标准…
不同情况下,PID自动控制回路并不一定需要Lambda工程整定方法。PID参数整定方法越简单越好用。PID参数整定分成了如下5种情况
电炉烘箱冷态启动就跳断路器,这是启动冲击电流造成,选用昌晖YR-RJD系列软启动功能温控器或带软启动功能电力调整器来进行斜坡调节,相当于给电流冲击加装了一道缓冲阀,峰值被明显削平,断路器自然就不会轻易误动作了

如果说PLC工程师技术水平做个划分,看看这篇PLC工程师段位排名,评估一下自己处于什么段位

配电箱里漏电开关上的T键按下去没反应,是不是坏了?又不影响送电,可不可以将就用?漏电保护器按测试键不跳,就是漏电保护器坏了,立即更换,否则可能要搭上一条人命!今天昌晖仪表就把漏电保护器按测试键不跳的原因和后果给大家讲讲
在模温机、电炉、窑炉、烘箱等行业,经常遇到一种令人头疼的情况:温控器显示输出100%,电力调整器面板数值正常,电流表也有显示,但设备温度就是升不上去。很多人第一反应是加热管老化、温控器损坏或电源电压不足。实际现场排查后发现,真正问题往往出在电力调整器的调功模式…

如果你正在负责一个新项目,从现在开始把HMI标准纳入设计输入。如果你接手的是一个存量系统,从DCS画面十清楚开始一条一条自检。每一次规范化的改进,都是在给操作员减负,也是在给工厂的安全裕度加码
文章回答HAZOP分析、LOPA分析和SIL评估谁来做?什么时间做?依据哪些规范?这三个问题

无功补偿控制器 的投切顺序怎么设置?文章结合实例分享无功补偿控制器在不同工况下正确的投切顺序:普通等容电容柜选循环投切,无源滤波器必须按“先低后高”顺序投切
怎样才能写好DCS技术标书?DCS技术标书是写给评标专家看的得分工具,核心逻辑是“逐条响应和重点突出”,写好DCS技术标书需要懂技术和懂规则。昌晖仪表将写好DCS技术标书背后的逻辑、要点和技巧分享给大家

本文分享PC级与CB级双电源切换开关的功能差异,其次基于其差异谈其上部的保护装置配置

温度仪表在LNG接收站开车前预冷、日常运行监控等操作中发挥着重要作用。从就地温度仪表选型、远传温度仪表选型、温度计套管、主要设置场所、分布式光纤测温的新技术应用等方面进行分析,给出温度测量仪表选型建议,用于LNG接收站工程温度仪表选型设计
K型热电偶是工程上广泛使用的温度传感器,被应用于各个行业的温度测量中。电厂需要使用较多的热电偶对温度进行监测,然而,电厂烟道环境对热电偶的耐用性与测温稳定性构成严峻挑战:一方面,烟道内高温,通常为600~1000℃,会加速热电偶保护套管的氧化与热疲劳,且316 L不锈钢…

昌晖仪表生产高精度、高可靠性 贸易结算流量积算仪YR-GFQ系列,下限流量计费是该流量积算仪特有功能之一。本文解读贸易结算流量积算仪下限流量计费三段算法

二线制变送器和三线制变送器在工业现场使用较多,4-20mA回路故障时有发生,昌晖仪表在本文分享不同供电模式下二线制变送器4-20mA回路和三线制变送器4-20mA回路的故障检查及处理经验

AQ3067执行后,可燃有毒气体探测器功能失效判为重大隐患,可燃气体报警器量程问题又让企业和生产商头疼不已。《可燃气体探测器第1部分:工业及商业用途点型可燃气体探测器》GB15322.1-2019执行后,第3.1条把可燃性气体探测器按测量范围分为三类:①测量范围在3%LEL~100%LEL之间…

遇到PLC莫名停机、乱码、模拟量跳变,你的第一反映是PLC程序出问题了,还是现场存在干扰?其实电工如果能分清谐波干扰PLC还是PLC程序故障,既可及时处理PLC故障,又可以给厂里省下一些维修费用

在自动与手动方式相互切换过程中,应做到无扰切换。即在切换的瞬间,应当保持调节器的输出不变,这样使执行器的位置不会在切换过程中突然变化,就不会对生产过程引入附加的扰动,这称为无扰动切换

常有新手在DCS项目实施中踩坑,有些坑年年有人踩,有些坑踩一次就够你记一辈子。昌晖仪表将DCS开工中常见的10个坑整理出来,结合错误现象分析原因,并给出正确做法,帮助大家迅速提升技能。DCS新手避坑指南对入职第一年DCS新手很有帮助

电容柜选型你会算吗?电容柜电容总容量选大过补烧设备,选小了功率因素不达标罚款,昌晖仪表通过两个真实案例把电容柜选型时电容总容量计算的经验口诀法、查电费单法和实测法讲清楚
功率因数补到0.95最省钱,功率因素低于0.9罚款,0.9不赚钱,0.95以上没意义

昌晖仪表的P&ID读图实战六步法适合刚入行的工程师,也适合想系统梳理的老手。读懂P&ID,不只是记住符号,更是理解控制策略背后的工程逻辑

配电房谐波不大,电容柜的无功补偿控制器自动投入,经常会跳电容的小开关,而手动投入不会跳,为什么?电容柜自动投切跳闸,手动不跳,大概率是无功补偿控制器投切太快、间隔太短、放电不充分。别一上来就换开关,先调参数、查放电电阻。曾有用户咨询:厂里电容柜谐波不大,无…

继电器的吸合电流和释放电流通常不在继电器本体标注,需查阅其规格书或通过实测获取

在加热场景中电力调整器风扇一直转,是不是坏了?昌晖仪表在本文分析这个现象的原因并给大家提供电力调整器选型建议。其实,仅凭电力调整器的风扇一直转并不能直接判断该设备故障可控硅电力调整器在工作时,内部功率模块和散热器会产生热量。风扇持续运转,本质上是散热系统在…
仪表自动控制有问题时往往存在以下两个特征:仪表自动控制回路需要操作工干预,包括频繁修改设定值,只能手动操作控制手段,异常情况需要切除控制回路模式手段干预等;在装置中出现了周期性振荡的过程变量。这往往是某个或几个控制回路有问题导致的,很多时候需要找到根本原因…
仪表和PLC的RS485通讯老掉线,多数都是以下原因造成。昌晖仪表在本文聊聊仪表和PLC的RS485通讯老掉线原因和处理方法







