在初始稳态条件下做开环阶跃测试。将PID控制器的输出(OP)进行幅度为△OP的阶跃改变并保持,过程变量(PV)将会发生改变并最终稳定变化。这种描述系统或过程中输入与输出关系的曲线称为“过程响应曲线”。在许多领域,都使用响应曲线进行分析和优化过程的性能。
观察过程响应曲线,当该曲线随着时间按照固定斜率变化时,表示过程变量的动态过程结束,可以结束开环阶跃测试。
阶跃响应曲线如图1所示。取开环阶跃测试开始的坐标(时间点,过程变量值)为“初始点”,过程变量以固定斜率变化之后的任一坐标(时间点,过程变量值)作为“对角点”,建立一个矩形。工业中自衡过程变量常常以固定0斜率稳定变化。矩形的上下边距离为△PV。
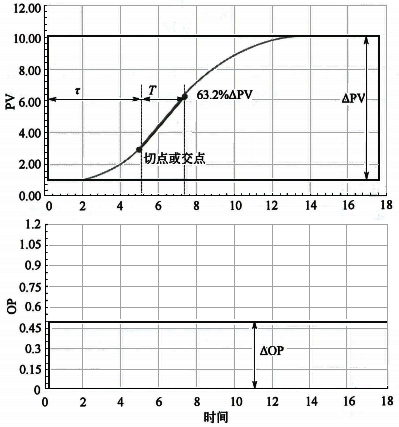
图1 基于响应曲线的控制模型辨识工程方法1
为了描述被控变量的主要动态过程,我们需要确定响应曲线第一次到达63.2%△PV的位置。从“初始点”到该位置的时间是等效纯滞后时间和等效时间常数的总和。现在要将这个时间段分割为等效纯滞后时间和等效时间常数。从响应曲线第一次到达63.2%△PV的位置出发,沿响应曲线向初始点方向作响应曲线的切线或交线,切点或交点就是分割点。如果是一阶模型,分割点会在矩形的底边;如果是多容模型,分割点会在响应曲线上。
初始点到分割点的时间为等效纯滞后时间τ,分割点到63.2%△PV的时间为等效时间常数T。系统等效纯滞后时间一般包括真实纯滞后时间、反向时间、小时间常数时间等。
如果是一阶对象,交点会在实际纯滞后时间,此时等效纯滞后时间等于实际纯滞后时间,等效时间常数等于实际时间常数。如果是多容对象,则会和响应曲线相切,此时等效纯滞后时间大于实际纯滞后时间。等效纯滞后时间和等效时间常数的总和不变,在参数估计中,为了增加鲁棒性,倾向于高估等效纯滞后时间,低估等效时间常数。
等效模型增益:

工业中积分过程变量以固定非0斜率稳定变化,也可以使用上面的类似方法进行工程辨识。阶跃响应曲线如图2所示。矩形的上下边距离为△PV。
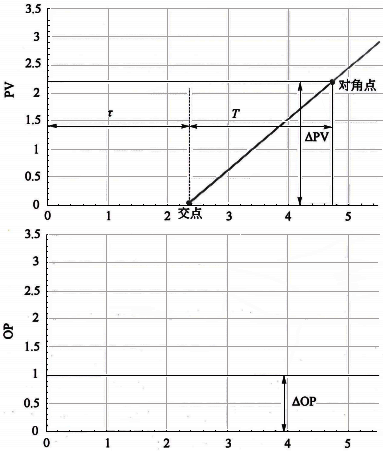
图2 基于响应曲线的控制模型辨识工程方法2
此时,从“初始点”到对角点的时间是等效纯滞后时间和等效时间常数的总和。现在要将这个时间段分割为等效纯滞后时间和等效时间常数。从对角点的位置出发沿响应曲线向初始点方向作响应曲线的切线,切线与矩形的底边的交点为分割点。
初始点到分割点的时间为等效纯滞后时间,分割点到对角点的时间为等效时间常数T。系统等效纯滞后时间一般包括真实纯滞后时间、反向时间、小时间常数时间等。
此时Lambda整定方法可以合并为:







