所有类别
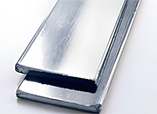
铝排载流量的理论计算可以先参考DIN43670的基础数据,再结合环境温度和允许运行温度加以仿真和试验修正

现场一个压力自动控制PID的比例度是30%,这个压力自动控制的很不稳定。工艺的说法这个压力用两个循环水冷凝器控制,容易偏流所以控制的不好。实际上PID参数也是问题。这就是笔者常说的量程的影响。这压力变送器的量程是0~1MPa,PID调节器的压力设定值是0.342MPa,调节阀变化5%…

4P漏电保护开关能否用于三相或单相回路?这里先给出答案:4P漏电保护开关能否用于三相或单相回路,从电流矢量和检测原理的角度考虑,漏电保护功能不受影响,但是测试按钮开关取电的形式会决定主回路接线,所以建议参考厂家的安装示意图

单是第一眼看到这个方法,的确是一见钟情了,非常简易的方案,低功耗设计,将电路板集成在表笔中,简约而不简单。很难想象,这个是一个4位万用表

电子布线技术的优势在于其简化了设计和安装流程。通过灵活配置I/O,设计人员能够根据实际需求进行定制,从而提高了设计的灵活性。本文从应用点数、系统冗余、使用温度条件和现场通讯网络结构四个方面对比艾默生与和利时电子布线差异,方便大家选择和使用电子布线系统

上图是用一个大泵同时给多个分支流程供料的常见工艺。如果是一个大的工频离心泵,这两个流量同时投自动,因为有相互影响,需要将两个控制回路一个调整的快一些,另一个慢一些以实现解耦。现场很多支路流量控制是很难同时投自动化,如果支路流量更多,难度就更大。最简单的思路…

调频连续波雷达普遍用于仪表行业物位测量和汽车行业的自动驾驶,昌晖仪表在本文分享调频连续波雷达的基础知识供大家学习
基础控制回路的性能是先进控制项目性能的重要组成部分。PID和先进控制都是解决过程问题的工具,先进控制项目一定要先整定PID参数。那么,先进控制项目为什么一定要先整定PID参数呢?1、在整个先进控制项目中,无论是稳定性还是效益有约一半来自基础控制回路的改进。PID参数整定…

上位机等于硬件,组态软件等于工具;上位机提供运行平台,组态软件赋予平台“智慧”。无论是工业车间、发电厂,还是智慧城市中的自动化项目,了解两者的关系与区别,是掌握现代工业控制系统的关键步骤
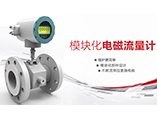
气泡对于电磁流量计来说是个隐形“杀手”,仪表工日常维护中面对这个问题时也是头疼不已,倒不是说对其没有办法,而是这个问题很难被排查和发现,因为我们眼睛看不见,手又摸不着,所以一时间对这个问题很难从直观上去进行判断

配电箱的“门”不是单指门锁,但门锁是门的必要组成部分,且必须存在,以满足安全和规范要求。在做设计、施工或验收,建议明确门锁的类型,如三角锁、圆柱锁、防水锁等,还要明确门锁的防护等级

对于电动机回路热继电器或电动机保护型断路器在起动过程中误跳的案例,建议先确定电动机的实际起动时间,再与过载保护器件的脱扣等级对应的数字进行比较;起动时间超过10秒的电动机,不建议选用常规的热继电器,无法躲过长时间起动;起动时间超过10秒的电动机,建议选择脱扣等…

配电回路主干线上如果需要配出支路,预制分支电缆与T接端子怎么选?文章对比分析预制分支电缆与T接端子核心特性差异、全生命周期成本模型和可靠性验证数据,给大家分享预制分支电缆、T接端子与使用场景适配的选用经验。1、核心特性差异①预制分支电缆◆集成化设计:工厂预制的…

“自动化以后是个吃软饭的行业”。—觉得这是个好话题,一直试图去描述这个话题。今天,大家说软件定义制造、软件定义自动化,其实,通俗地说,就是我们自动化行业越来越多靠软件赢得未来的生存

文章从JJF1923-2021《电测量仪表校验装置校准规范》制定背景、制定过程、主要内容和技术指标、校准方法等方面进行全面的解读,旨在指导相关技术人员正确执行该规范

文章结合现行有效的国家检定规程、校准规范针对性的对各类温度二次仪表示值误差的溯源及溯源过程中注意事项进行了阐述和对比,对温度二次仪表的检定、校准和应用具有指导意义

本文根据笔者多年工作经验,主要针对热学计量中作为标准器具的电测仪表(多为数字多用表)的等级定义、选用原则等方面对目前存在较大争议的几个问题进行了探讨,对合理表述热学计量用电测仪表的参数、等级以及选取标准器具实现量值传递具有重要意义
宋太祖赵匡胤(公元927年-公元976年),字元朗,宋朝开国皇帝。后唐明宗天成年间生于洛阳夹马营,祖籍涿郡。赵匡胤于后汉隐帝时投奔郭威,郭威废汉建周后始入宦途,后跟随周世宗柴荣从征南唐,多有功绩。后周显德七年(公元960年)发生“陈桥兵变”,后周恭帝柴宗训禅位,赵匡胤登…

APC和PID的设法方法不同,并不要求单回路设定值。不构建变量、不重构问题,只使用测量值和操纵变量,APC也能实现多变量控制。当变量较多时,构建变量、重构问题的PID控制方案设计难度较大、灵活性不足,使用APC会更容易进行控制方案设计。仅仅把逻辑显性控制化的控制方案搬到A…

仪表全生命周期管理是一种系统化、数字化的管理方法,它把仪表从“生”到“废”的全过程当作一条完整链条,统一规划、动态管控。核心理念是:在仪表的设计选型、制造、安装、运行、维护、报废等各个阶段,通过数据贯通和协同管理,实现安全、可靠、经济、合规的管理目标
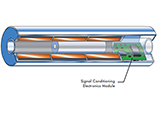
LVDT是线性可变差分变压器(Linear Variable Differential Transformer)的首字母缩写,这是一种常见的机电传感器类型,能够将其机械耦合的物体的直线运动转换为相应的电信号。市面上常见的LVDT线性位置传感器可以测量小至百万分之几英寸的运动,也可测量高达20英寸(0.5米)的位置…

真空断路器的额定分断电流(即额定短路开断电流)与额定短路关合电流之间存在这个2.5倍数关系

先进控制在工业软件的支持下,定义好被控变量和操纵变量后,只需要设计合理的模型和参数就能实现控制要求。这和预制菜也是一个道理。过程控制最怕千奇百怪,最好是都是一个样子,谁都能看懂,谁都能维护,看不懂了工厂里就不敢用。过程控制的解决方案最好都是标准化的。预制是…

当低压断路器短延时保护整定倍数大于6Ir时,如果故障电流为6Ir,那么断路器将按长延时保护对应@6Ir的延时时间动作;当低压断路器短延时保护整定电流小于(等于)6Ir时,只要故障电流大于(等于)短延时保护设定值(包括6Ir),那么断路器将按短延时保护的延时时间Tsd动作
对于从事电气设备安装与维修人员来说,读懂电路图是最基本的要求,二次回路也是电路图的重要组成部分。昌晖仪表网在本文对电气二次回路的定义和二次回路组成做介绍

人体静电消除器相关标准规范基于《立式圆筒形钢制焊接储罐安全技术规范》AQ3053-2015、《静电防护管理通用要求》GB/T39587-2020、《石油库设计规范》GB50074-2014、《防止静电事故通用导则》GB12158-2006、《防静电工程施工与质量验收规范》GB50944-2013、《本安型人体静电消除…

对PID和APC都要重视,把解决问题、工具和效果要分开看。PID不是落后,APC也不是零手动、自主运行、黑屏。方法论就是方法论不是解决问题本身

PID控制器参数整定是控制系统设计的关键环节,昌晖仪表整理了一些实用PID控制器参数整定技巧供大家参考

相电压、线电压、相电流和线电流

仪表由企业的设备部门管理,计量由企业的生产部门管理,两个专业对计量器具的关注点会有较大的不同,对法律规范的运用和解读也有偏差。计量器具作为一类较特殊的仪表,它在使用和管理中既要符合计量标准规范,也要满足生产技术要求,还要考虑运营成本效益等,各种约束条件比较…

一体化温度变送器的不确定度评定用一等标准铂电阻温度计标准装置,采用比较法校准一体化温度变送器。将温度变送器的传感器和标准铂电阻插入同一恒温槽内,供给温度变送器24V电源。从测量范围的下限温度开始,自下而上依次测量。在被校点温度足够稳定后,轮流对标准铂电阻和变送…

在我国自动化控制领域应用较广泛的国外工业自动化组态软件有Wonderware公司InTouch、西门子公司Wincc、GE公司iFix和悉雅特公司Citet组态软件,昌晖仪表对这四种常用国外组态软件做相关介绍。组态软件是一种用于实时监视和控制工业过程的软件,它凭借用户友好的图形化操作界面与…
将PID的积分作用命名为重置,反映了工程师关注解决问题本身的特质。纯比例控制有余差这个事实,并没有被深入研究背后的科学原因。而是把纯比例控制有余差当作一个问题进行解决,解决的方法体现了工业上know-how的特点

在一个多个PID控制回路共同作用的复杂装置,要以一个更系统、更全面、更宏观的观点进行PID回路整定,可能才是解决问题的关键。在控制优化过程中,问题不仅仅在PID参数,组态、参数、方案、设备都可能是根因。学习PID整定方法是为了理解PID的能力,提高参数整定的科学性,但是真…

压力开关是一种借助弹性元件受压后产生位移以驱使微动开关工作的压力控制仪表,通常使用在报警或联锁保护系统中。其工作原理是:当被测压力达到设定值时,弹性元件的自由端产生位移,直接或经过比较后推动开关元件,改变开关元件的通断状况,可发出用于报警、联锁的接点信号,…

中石化仪表维护检修通用要求适用于中国石油化工集团有限公司、中国石油化工股份有限公司(以下简称“中国石化”)所属各企业中生产过程检测、控制等自动化仪表设备的日常维护和检修

昌晖仪表以图文形式分享隔离式安全栅检修内容、质量标准及维护检修规程

在工业自动化项目中,C#开发的上位机和PLC通信是实现设备管理与监控的重要技术手段。在实际过程中,为确保通信的实时性与可靠性,通常会引入心跳机制。昌晖仪表将以通俗的语言介绍心跳机制原理及实现关键技术点

无纸记录仪是将采集的数据、运算数据以时间为基轴记录在仪器内部的存储载体中的记录设施,无须消耗任何纸张、笔墨。主要有显示、记录、报警、历史数据、PID调节及在线组态等功能。可与上位机通过标准的RS485、RS232C串行口或以太网口连接和通讯。记录在仪器内部的存储数据,通…

昌晖仪表是外贴式超声波液位计生产厂家,昌晖仪表在本文分享外贴式超声波液位计显示故障代码、测量出现偏差、液位指示异常、无显示、显示移动等12个故障的处理方法,帮助使用者用好外贴式超声波液位计

昌晖仪表是外贴式超声波液位计生产厂家,本外贴式超声波液位计检查、使用、维护和校验规程以YR-510WT型外贴式超声波液位计为例

为了规范安全仪表系统(含报警联锁)管控标准,在公司范围内统一安全仪表系统(含报警联锁)最低管控标准,特制定本标准

基于光能的火焰检测器分为红外火检检测器、紫外火检检测器和复合火检检测器三类,为方便大家深入了解火检检测器,昌晖仪表从检测原理、适用场景、抗干扰能力和响应速度与寿命四个维度红外火检检测器和紫外火检检测器区别

IEC 60617和IEC 60417都是IEC制定的图形符号标准,但它们的用途、对象和呈现形式不同:IEC 60417 DB- Graphical symbols for use on equipment;IEC 60617 DB - Graphical Symbols for Diagrams

昌晖仪表从材料工艺、结构设计、制造精度、应用场景及市场策略五个维度展开对比分析进口卡套接头和国产卡套接头,并结合典型案例探讨国产与进口卡套接头的适配性选择

电表用DL/T645-2007协议,是因为电力行业需要统一、专用、安全的通信规范来保障电能计量和管理的严谨性;而多功能电力仪表用MODBUS协议,是因为工业场景更需要开放、灵活、兼容的通用协议来实现多设备协同。DL/T645-2007和MODBUS协议选择,本质是行业专属需求与跨领域通用需求…

测量的目的是获得过程变量的真实值,而在测量过程中,由于使用的测量工具本身不够精确、观测者的主观性和周围环境的影响等,使得测量值与真实值不可能完全一样,始终存在一定的差值,这个差值就是测量误差(measurement error)

JJG105-2019《转速表》检定规程对转速表的检定提供了科学、规范的依据。由于JJG105-2019主要内容做了较大的修改,检定员对规程的消化理解有个过程,在贯彻过程中经常会遇到一些疑惑。本文结合工作经验,从转速表检定的角度对JJG105-2019和JJG105-2000进行比较,对新增内容进行…

本文系统地阐述了关于TSI系统在火电机组中安装和调试的方法经验,并对TSI系统主要故障原因做出了分析,同时根据实际工况中出现的问题做出分析并提出解决办法,从而提高读者对TSI系统安装与调试的水平

键相与转速在机械监测领域中具有不同的含义和作用,昌晖仪表从定义、原理、应用与作用方面对比键相与转速的区别







