AT&T Bell实验室的工程师以及科学家,发展出控制系统分析与设计的频域方法。
故事要从Black(Harold Stephen Black,1898-1983,American electrical engineer)在1927年发明负反馈放大器说起(“反馈(feedback)”一词被正式使用)。
第一次世界大战后,随着电子放大器的出现,远距离通话成为可能。距离的增加,电能损耗也增加。为了增加传输距离,需要用直径较大的传输线或增加放大器的个数,但放大器个数越多,因非线性以及噪声造成的失真越大。1920年前后,放大问题已经成为开发长距离电话技术的一个严重阻碍。
Black当时是AT&T的工程师,他深入研究了这个问题,他发明的负反馈放大器通过把输出的放大信号再反馈回输入端,就可以减小由于噪声和器件参数漂移造成的失真。

图18 Black发明的负反馈放大器抗扰原理
虽然反馈的原理在公元前300年古希腊人和阿拉伯人发明的浮球调节装置、17世纪的温度调节器、18世纪工业革命的标志-瓦特蒸汽机中采用的飞球式调速器中就存在,但"反馈(feedback)"一词被正式使用则是在Black发明负反馈放大器时。
关于Black的这个发明,有个被大家津津乐道的故事:1927年8月2日,Black前往上班途中,在Hudson河的渡船Lackawanna Ferry上灵光一闪,想出了在控制发展历史上具有重要意义的负反馈放大器。由于手头没有合适的纸张,他将这个灵感记在了一份纽约时报上,这份报纸已成为一件珍贵的文物珍藏在AT&T的档案馆中。(注:在8月6日周六的上班途中,Black再次在渡船上在当天的一份纽约时报上写了更详细的过程)。

图19 Black负反馈放大器的灵感来自于上班途中的灵光一现,只能将其记录在手头的纽约时报上
但其实为了这个灵光一现,Black持续不断地努力了6年。1921年,Black毕业于伍斯特工业学院(Worcester Polytechnic Institute),随后到Bell实验室工作。作为新人,他希望尽可能多地了解公司的业务,于是查阅了大量公司文档,发现公司当前遇到的主要问题是如何使放大器可以串联起来把信号稳定无失真地传到千里之外。于是,他要求承担这项工作,他上司说“可以,但在不影响分配给他的其它工作的前提下”。于是,最初的两年,他利用周末和晚上的时间阅读了所有能找到的关于非线性电路方面的材料以及公司的有关文档,后4年则几乎无时无刻不在琢磨怎么实现一个具有线性功能的放大器,在对放大器问题进行了几年艰苦的研究之后,这才有了1927年8月2日上班路上的灵光一现。
而从负反馈放大器的发明到其实际应用则又经历了一段充满荆棘的漫长路途。
为了减小失真(误差)而引入的反馈装置,有可能会使得系统发出尖叫(singing/oscillating)而变得不稳定(反馈的代价:系统复杂了,可能造成系统不稳定)。
这又涉及到了Maxwell和Routh研究过的稳定性问题,但这时,系统的动态特性已经很复杂(通常是几十阶的高阶微分方程),Routh判据很难再有帮助。贝尔电话实验室的通信工程师和科学家们开始考虑用频率响应(frequency response)和复变函数理论进行分析,发展出了控制系统分析与设计的频域方法。
负反馈放大器的发明及其发展被认为是发明家、工程师与受过良好数学物理训练的理论研究团队成功合作的杰出案例,其中有2个代表性人物:Harry Nyquist(1889-1976)和Hendrik Bode(1905-1982)。
H. Nyquist,1917年获得耶鲁大学物理学博士学位,1917-1934年就职于AT&T。1928年,Nyquist与AT&T的其他一些工程师一起与Black商讨如何将负反馈放大器用于一种新的电缆通信系统。他做了负反馈系统的分析,并最终在频域上建立了一个与已有工作完全不同的稳定性判据-Nyquist判据,Nyquist判据可以直接指导如何调整控制器确保系统稳定。
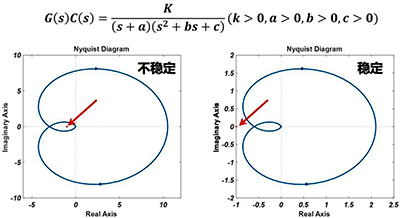
图20 Nyquist在频域上建立了一个与已有工作完全不同的稳定性判据-Nyquist稳定判据
H. Bode,1926年获得Ohio State University数学硕士学位,然后就职于Bell实验室,期间又于1935年取得Columbia University物理博士学位。1928年,在开发一种新的同轴电缆通信系统时,Bode带领一组数学家研究能充分利用Black放大器优点的系统设计方法。1940年,Bode在其经典论文“Relations between attenuation and phase in feedback amplifier design”中进一步提出了利用频域的Bode图、幅值裕度/相位裕度等相对稳定性概念来设计负反馈放大器的方法,并指出了系统增益与带宽的极限关系。

图21 Bode图:通过频域的幅值裕度/相位裕度分析系统稳定性
二战中,Bode参加了高射炮控制系统的研制,他参与研制的高射炮在1944年的安齐奥战役(Battle of Anzio)和诺曼底登陆时都发挥了很大的威力。他的研究工作一直持续到美国太空计划时代,是一位在学术界广受尊重的科学家。Bode去世后,1989年IEEE控制系统协会(IEEE Control System Society,IEEECSS)设立Bode Lecture Prize以表彰对控制系统科学和工程做出突出贡献的人。2019年中国科学院系统控制重点实验室郭雷院士“因在自适应控制、系统辨识、自适应信号处理、随机系统及应用数学领域的根本性和实际性贡献”被授予Bode Lecture Prize,是该奖设立30年以来,中国和世界华人中第一位获此荣誉者。
2019年中国科学院系统控制重点实验室郭雷院士被授予Bode Lecture Prize,是该奖设立30年以来,中国和世界华人中第一位获此荣誉者。
AT&T Bell实验室的工程师以及科学家团队的这些工作最终发展为控制系统分析与设计的频域方法。
控制系统分析与设计的频域方法至今还是控制工程师们最喜欢和信赖的一种方法,仍然在广泛应用。频域方法可以摆脱处理微分方程的困难,直接通过系统频域响应的实验数据进行控制系统的分析与设计。
还有一个重要原因是,虽然稳定性是控制系统设计中首当其冲的问题,但系统仅有稳定性是不够的,一个好的控制系统除了需要具有稳定性外,还应兼顾快速性、准确性、抗扰性等可能彼此冲突的性能指标,频域设计可以比较清楚地通过系统的频率响应Bode图同时在不同频段兼顾各项指标进行设计,简明而直接。

图22 控制系统多项指标可以通过频域方法简明且直接地进行分析与设计
第2个群体在美国过程工业领域,系统地建立和开发了控制系统设计方法,代表性工作:PI及PID控制的Ziegler-Nichols调整法
20世纪30~40年代,美国过程工业中的工程师和科学家开始系统地建立和开发控制系统设计方法,一个代表性工作是J.G.Ziegler和N.B.Nichols在1942年提出了PI及PID控制的参数整定方法,后来被称为Ziegler-Nichols调整法。
第3个群体在麻省理工学院(MIT)的电子工程系, 设计了微分方程模拟计算机,进行控制系统仿真。
1930s,Vannevar Bush在MIT带领Harold Hazen,Gordon Brown和Claude Shannon设计了微分方程模拟计算机(the differential analyzer),从而可以进行动态系统仿真。其后,Harold Hazen和 Gordon Brown领导的小组利用模拟计算机进行了控制系统的时域仿真。
关于控制系统的计算机仿真这项工作要不要在控制发展史里介绍笔者自己也反复过几次,中间有几次上课没有讲。后来,发现控制室的学生大多本科是学数学的,不太喜欢计算机仿真,反而觉得有必要给学生们强调一下计算机仿真的重要性。
随着计算机技术的快速发展,计算机仿真在控制研究中已经发挥着越来越重要的作用,不仅仅是指学术论文中那种简单的仿真,虽然现在仿真已经是大部分论文中的一个重要环节,计算机仿真更重要的价值还在于:
1、可以直接启发新的研究思路和灵感,当然由仿真启发的新方法还需要经过艰难的严格理论论证和严苛的物理实验的考验。
2、论证控制方法的重要手段。如今控制问题变得越来越复杂,需要考虑的因素越来越多,传统的理论分析手段难以彻底解决问题时,详尽充分的计算机仿真已成为论证控制方法的重要手段。比如,在航天工程中研究新的飞行方案时,稳定裕度分析往往还需要结合大量拉偏参数以及考虑各种物理器件约束的计算机仿真验证。因此,我们也许应该思考理论分析的内涵是不是也应该随之与时俱进。
二战后,经典控制技术基本建立起来
二战的爆发使控制系统的工作集中在几个特别的问题上,最重要的一个是防空高射炮瞄准系统(aiming of anti-aircraft guns)。这是一个复杂的问题,需要完成快速发现飞行目标、准确预报飞行目标的位置、精确瞄准等一系列动作。为了完成这个任务,需要将雷达跟踪系统(automatic tracking radar system)直接与射击指挥仪(gun director)并最终与炮火位置控制器(gun position controller)相连。
为此,美国集中了当时的机械、电力电子、通信等各方面的工程师和科学家通力协作来完成这一系统,如SCR-584雷达系统(SCR-584 radar system)由MIT雷达实验室研制,M9射击指挥仪(M9 director)则由Bell实验室集合C.A.Lovell,D.B. Parkinson,Bode,R.C. Blackman,Claude Shannon等人研制。
这是一次成功的合作,这个系统在1944年6月-8月英国东南部抗击德国V-1火箭空袭中获得了很高的成功率,击落了上千枚V-1火箭。
V-1火箭被认为是第一个可操作的自动化机器炸弹*注2(the first operational robot bomb),飞行速度快且高度低,对炮火有很强的抵抗力。
1944年的伦敦空战被认为是自动机战争的开端(the beginning of the first battle of the robots):由SCR-584 雷达、M9 射击指挥仪、炮台组合成自动控制系统发射带有近身引信(the Proximity fuze)的VT(variable time)robot与V-1 robot的抗争。
*注2:2018年7月,苏剑波邀请高志强和我在上海交大讲授了一次“自抗扰控制技术”的暑期课程,其中有个单元是苏剑波讲机器人,他的开场白让我印象深刻,说他读硕士学位时曾经不喜欢机器人这个方向,因为觉得“那时的robot根本就没人样!”。这里把robot翻译成机器人似乎也不合适,翻了下字典,robot原文为能自动运动的机器(a mechanism that can move automatically)。
战后,经典控制技术基本建立起来了,是一种针对单输入线性定常系统的设计方法。主要有以微分方程描述的系统特征根、以及上升时间、超调、稳态误差和阻尼等指标表述系统性能的时域方法,和以带宽、谐振、幅值/相位裕度以及频域响应图展示系统行为的频域方法,有人喜欢时域方法,因为可以直观了解系统的实时行为,而二战中的工作充分显示了频域响应方法在反馈系统设计上的威力。
战争中解决防空控制问题的经历也使人们进一步认识到:
1、将几种由不同小组设计的部件集成在一起工作时,整个系统的性能就不那么依赖各个独立单元的性能,而在于它们是否能很好地协同工作。
2、无论是通讯工程师擅长使用的频域方法还是机械工程师喜欢的时域方法都不足以完成设计,所需要的是能综合两者优点的方法。
3、基于线性和确定性假设进行的控制系统设计存在局限,因为,实际系统都是非线性的,测量包含误差和噪声,过程和环境存在不确定性,带宽的约束、噪声的影响、以及非线性特性都会给系统设计带来困难。
二战的防空问题与维纳的“控制论(Cybernetics)”
二战中的防空问题还促成了另一个重要的进展:维纳(Norbert Wiener,1894-1964)的“控制论(Cybernetics)”。
1940-1945年5年内,美国国防研究委员会火控部(fire control division,National Defense Research Committee)一共资助了80个研究项目,经费数目最大也是最成功的一个($1.5million)是Bell实验室的M-9射击指挥仪,经费最小的一个项目($2325)是给维纳的“预测目标飞行模式(how to predict flight patterns)”,维纳从随机系统的角度进行研究。
虽然维纳的项目研究并未真正用于实际,但这个工作促使他进一步思考有关反馈、信息、控制、输入、输出、自我平衡、预测和滤波(feedback, information,control,input,output,stability,homeostasis,prediction,and filtering)等问题,并最终创立cybernetics(1948年出版了cybernetics这本著作。
维纳的Cybernetics学说既有理性的抽象概念如控制、反馈,也有丰富的想象力,如在人机关系方面,人与机器的融合,将机器拟人化以及人机械化。Cybernetics发表后,马上被认为是一种新思想甚至新兴学科,而吸引了工程、数学、生物、心理甚至社会、哲学、政治等众多领域的极大关注。
许多人认为维纳的cybernetics不应该翻译成“控制论”,从书名就可看出cybernetics具有控制、通讯以及人机交互等多重含义,翻译成控制论只取了其中控制的部分。现在人工智能又热了起来,也有人认为维纳的cybernetics其实就是描述的人工智能。
走马观花最后一站:饱受争议的现代控制理论
战后控制科学的发展更主要的受到2大因素的推动:一是美苏太空竞赛,二是数字计算机的出现,可以完成复杂的计算和动态系统仿真。
航天任务需要研究解决导弹与太空飞行器的发射(launching)、机动(maneuvering)、制导(guidance)及跟踪(tracking)等问题,这个问题的特点是物理模型可以用一组一阶微分方程(线性或非线性)描述,再就是航天器上装有具备良好精度的测量装置(传感器)用于状态测量、轨迹规划,于是发展出状态空间方法。
航天控制系统,比以往的控制系统复杂多了。图5展示了控制系统的几个基本组成,在最初的简单控制系统里,如水钟、飞球式调速器,量测、控制量、执行机构是一体的,控制目标也比较简单。而航天的控制系统跟以往控制系统相比要复杂得多,飞行任务往往需要导航、制导和控制三部分协同完成。
对应控制系统基本组成框架,导航系统相当于测量部分,完成传感器测量及传感器信号的处理,以实时准确地提供飞行器在飞行当中的各种状态(位置、速度、姿态、角速度等);制导系统对应于给出预期运动指令的部分,根据飞行最终任务实时规划出当前飞行状态需要如何调整的指令值(通常为姿态指令),即此时期望输入是实时生成的而不是事先确定的;最后的关键就是控制系统根据导航系统提供的当前飞行状态和制导系统提出的运动指令形成控制量调整飞行状态。
航天任务的需求强力推动了现代控制理论的发展,Bellman的动态规划、Pontryagin的极大值原理和Kalman滤波被认为是现代控制理论的三个代表性工作。
1948年-1952年,Bellman(Richard Bellman,1920-1984)在兰德公司(Rand Corporation)数学部工作,他在研究解决导弹部署以达到最大破坏力问题的过程中,提出了“最优性原理(principle of optimality)”和“动态规划(dynamic programming)”。
Pontryagin(Lev Semenovich Pontryagin,1908-1988)是苏联数学家,航天飞行任务除了落点精度的要求外,系统性能还涉及一些其他限制: 如时间最短或燃料消耗最少等,Pontryagin 1956年提出的极大值原理是关于这类最优控制问题的理论基础。
Kalman滤波则是从带有噪声以及不完全测量的信号中提取所需信号的一种数学算法,Kalman滤波刚提出时曾受到很大质疑,直到1960年,Kalman(Rudolf Emil Kalman,1930-2016)访问NASA Ames研究中心,其后Kalman滤波成功地在阿波罗登月计划中得以应用。
文献把现代控制理论的起点放在1956年,那年在德国海得堡召开了一次自动控制的国际会议,很多国家的学术与工业界代表参加了会议。会上,一些代表提议成立一个国际组织来推动自动控制的发展,就是1957年9月在巴黎正式成立的国际自动控制联合会(IFAC),前苏联申请了1960年在莫斯科召开第一次IFAC世界大会。因此,也有把1960年第一届IFAC世界大会的召开作为现代控制理论起点的一个重要标志。
IFAC是一个以国家组织为其成员的国际性学术组织,中国为其创始成员国。
1960年6.27-7.2,第1届IFAC世界大会在莫斯科召开,1500名控制工程师和科学家齐聚莫斯科,会上有285篇论文进行了交流,不乏经典之作,如:
1.Boltyanski, Gamkrelidze, Mishchenko, and Pontryagin: ”The maximum principle in the theory of optimal processes of control”
2.R. Bellmanand R. Kalaba:”Dynamic program and feedback control”
3.R.E.Kalman:”On the General Theory of Control Systems”
此后,IFAC世界大会每3年举办一次,1999年第14届IFAC世界大会在北京召开。
读到这段历史时,笔者总感觉以一次会议或组织的成立作为一个学科新阶段的起点似乎理由不够充分,还是更应该看有什么新进展。为什么上述三项工作被称为现代控制理论的代表性工作是笔者在研究生刚入学时就一直有的疑问,几十年了,而现代控制理论在这几十年里也饱受不接地气的批评。2017年接到给北京五中学生以“数学与航天”为题讲一次课的任务,苦恼了很久,不知从哪破题,苦思冥想中,忽然对自己这个几十年前的疑问有了不同的认识。追根朔源,Kalman滤波比较好地解决了航天导航系统里的信息处理问题,而最优控制其实是期望解决航天制导系统的实时轨线规划问题。因此,根据导航、制导与控制的关系,这三个代表性工作并不是解决传统意义上的控制问题,而是传统控制中没有涉及的部分,即状态信息的提取和控制输入指令的规划。所以,可以说现代控制理论拓展了传统意义下控制研究的范畴,但对解决传统意义上的控制问题没有大的推动,依然是以PID为主的经典控制技术占主导,而现代控制理论里那些试图解决传统意义上控制问题的尝试似乎都不太成功,这是需要我们深思的。前面提到的自抗扰控制则汲取并拓展了现代控制理论信息处理中状态的概念和观测器的方法,在解决传统控制问题上突破了现有理论和方法的局限性。作为在PID控制基础上的创新,自抗扰控制已经实际应用于我国航天航空多个新型飞行器的飞行控制,以及我国一些电厂的控制回路中,而其未来的发展,也许应该思考如何扩展到更广的领域。
走马观花地回顾了控制历史之后,历史给我们哪些启发呢?笔者自己的几点感受:
1、控制科学是在解决实际问题中不断发展的
Maxwell系统地分析反馈控制稳定性的工作是具体针对当时调速器的稳定性问题,引申发展出来的;Black, Nyquist和Bode等人的频域分析与设计方法是为具体解决通讯快速发展中出现的稳定性问题而发展起来的,甚至现代控制理论也是由于太空计划中的一系列难题推动的。因此,控制的研究要针对实际问题,对所研究的问题要有透彻的了解,在创造性地解决问题中做出原创性的工作。
2、历史人物天才式贡献的背后是对钻研的热情和持续不断的努力
走马观花中愉快地在历史人物间穿行,流连忘返,被他们带着去探索各种问题,这是特别吸引笔者的部分,常常会有“他是怎么想出来的”的好奇,在这个过程中既感叹于他们的博学和才华,也被他们钻研的热情和执着所打动,任何一点进展都不是一蹴而就的。
3、控制系统的研究通常在时域/复数域/频域多个域中展开
时域的状态空间和微分方程分析,复数域的传递函数和零极点分析,以及频率域的带宽和幅值/相位裕度分析,每一种方法都有其适用的范围、优点和局限,最好能综合掌握、灵活运用。







