2005年,中国科学院系统控制重点实验室给室里研究生们开了一次“控制理论基础”的课程,由张纪峰、方海涛和笔者联合上课,每人讲4次,每次4小时。分配笔者讲“线性系统的频域响应方法”部分,主要考虑到控制室的学生本科大多是学数学的,对经典控制理论了解不多,希望给大家补上这部分内容。张纪峰还慷慨地给了笔者一堆资料,其中一本1996年IEEE Control Systems杂志第3期控制历史专辑(special issue on the history of control)让笔者如获至宝,至今仍霸为己有。当时看得如饥似渴,不断有“原来是这样”的收获,边看边想,如果学生们在学习第一门控制课程时就了解这些过往,控制课程就不再只是一条条定义一堆堆定理,还知道它们是为了解决什么问题而提出和建立的,解决了哪些问题,不足又在哪里。于是,就特别想在课上与学生们分享一下控制历史,但又感到历控制史太庞博,能讲出来的只是自己被吸引有所感触的部分,难免挂一漏万,因而加上“走马观花”的前缀。

图1 1996年IEEE Control Systems控制历史专辑
2007年给控制室研究生讲“线性系统”课程的补充部分,2011年、2016年2次给国科大研究生上“系统稳定性理论”课程都会兴致勃勃地把这部分内容端出来与学生们分享,而且这期间不断顺藤摸瓜,看见有关的素材会格外关注一下,加以补充。那时,查找资料还不像现在这么方便,高志强、姜钟平都从国外帮笔者查过资料买过书。
2018年,收到《系统与控制纵横》的约稿,笔者颇有些犹豫,主要还是担心内容上只是随自己兴趣而来,信马由缰。2019年给国科大本科生上“控制论”课程,又策马溜了一遍。终于,着手整理出来,并非完整的控制发展历史介绍,更像是一份教案。
本文以Stuart Bennett的文章为主线,以1996年专辑中President's Message里的一席话开场:"控制系统的历史悠久,没有人能确切知道第一个控制系统是什么时候发明的,但我们可以肯定地说,那时它一定没有被认为是一个"控制系统"。因为控制太自然了,从抽象意义上说,任何一个可以被另一个对象或过程改变的对象或过程都可称之为控制。我们无法确定人类是何时开始有目的地改变(控制)他所生存的环境"。
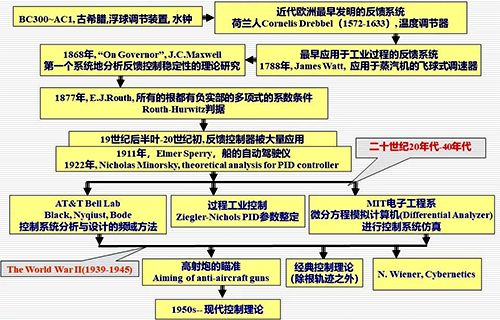
图2 走马观花线路图
一般认为,最早的控制系统是公元前300年~公元前1年古希腊人和阿拉伯人发明的水钟中的浮球调节装置。

图3 希腊人Ktesibios发明的水钟
图4为水钟中的浮球调节装置示意图,水从漏壶中以恒定的流量注入受水壶,浮在受水壶水面上的漏箭随水面上升指示时间。为了获得恒定的流量,必须使漏壶的水位保持恒定。当漏壶水位下降时,浮球随之下降,水自动注入漏壶,漏壶水位上升到设定高度时,浮球自动堵住入水口,漏壶水位保持在设定高度。

图4 水钟中的浮球调节装置示意图
现在我们通常把闭环(反馈)控制系统分为传感器、控制器、执行机构、被控对象等几个基本组成部分,在浮球调节装置这个设计巧妙的控制系统中,传感器、控制器、执行机构是一体的。
浮球调节装置现在还在我们的日常生活中广泛使用,就是抽水马桶。笔者自己学习控制的第一堂课上,老师给我们举的控制系统例子就是抽水马桶,当时还觉得怎么学了个不太“高雅”的专业。
在笔者的课程中一直希望能让学生们将课堂学习与实际联系起来,都会给学生们留一个大作业,每人选取一个自己感兴趣的控制系统结合课程内容进行分析介绍,学生们在这个环节的表现往往一改平时上课的沉闷,一个个熠熠生辉,每每让笔者心花怒放,惊叹不已。还记得A同学一开始交上来的选题是“抽水马桶系统”,笔者给改了个“好听”一点的题目“浮球液位控制系统”,结果A同学上台后的开场白是:“老师改的题目有点小了,我今天要讲的是抽水马桶系统中的控制问题”,立刻让笔者对这个看上去文文静静的小姑娘所表现出的执着的科学精神肃然起敬。
中国古代计时器则有刻漏、水运浑天仪、水运仪象台等,中国古代著名的控制系统还有指南车、都江堰水利工程等。
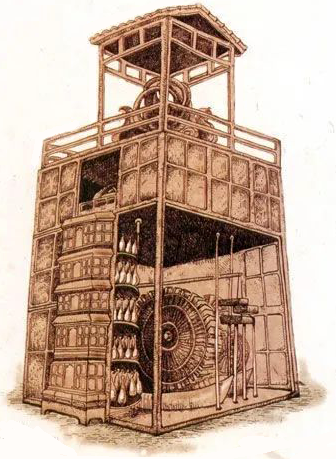
图5 北宋苏颂、韩公廉等人所制水运仪象台
Mayr的书中提到了中国古代的水运仪象台和指南车,但对其控制原理还有疑问。
都江堰水利工程(约公元前256-前251)则被许多人认为是一个杰出的控制系统,二千多年了,至今依然在造福成都平原。都江堰主体工程包括鱼嘴分水堤、飞沙堰溢洪道和宝瓶口进水口,被控量为进入成都的水量,枯水期不能少,丰水期不能多,是个多环节控制系统,而且充满各种扰动、不确定性和时变性。

图6 都江堰水利工程(图中的三个红圈分别为鱼嘴分水堤、飞沙堰溢洪道和宝瓶口进水口)
2015年第6届中瑞控制会议在成都召开,有先到达的瑞典参会人员迫不及待地去了都江堰,回来后就在自己报告的第一页打出都江堰的照片,赞叹这一控制系统。
近代欧洲最早发明的反馈控制系统是荷兰人Cornelis Drebbel(1572-1633)发明的温度调节器。

图7 荷兰人Drebbel发明的恒温箱
Drebbel是荷兰发明家,他发明了一个孵化小鸡的培育箱,通过控制炉温来给培育箱加热。

图8 培育箱温度控制装置示意图
图8为培育箱温度控制装置示意图,培育箱是双层的,中间有水,把热量均匀地传递给内层,温度传感器是一个内部装有酒精和水银的容器。当温度过高时,温度传感器的水银柱上升,阀门关闭,减少进气,降低温度;反之则水银柱下降,阀门打开,增加进气,提高温度。
人们普遍认为最早应用于工业过程的控制器是瓦特(James Watt,1736-1819)1788年应用于蒸汽机的飞球式调速器。飞球式调速器(Fly-ball governor),也称为离心式调速器(centrifugal governor)。

图9 飞球式调速器示意图
图9展示了其工作原理:假定发动机运行在平衡状态,两个重球在与中心轴成某一给定角度的锥面上围绕轴旋转。当发动机负载增大时,它的速度减慢,两个重球下跌到更小的锥面上旋转,引起杠杆运动打开蒸汽室主阀(执行机构),从而增加进入的蒸汽量,以恢复减小的速度。因此,球与中心轴的角度是用来传感输出速度的。
飞球式调速器被认为是控制发展史上的一个里程碑,Mayr书的封面就是一个飞球式调速器的图片,笔者曾在伦敦街头见到一尊雕塑,以飞球式调速器代表科学。

图10 伦敦街头代表科学的雕塑
关于飞球式调速器,有个误传流传较广,说是瓦特发明的。
飞球式调速器并不是瓦特发明的。关于应用离心力控制速度的研究,科学家惠更斯(Christiaan Huygens,1629-1695)和胡克(Robert Hooke,1635-1703)都曾钻研过这个问题,并设计了利用离心力控制速度的装置。

图11 惠更斯和胡克都曾钻研过利用离心力控制速度的问题,并设计了有关装置
到18世纪,在蒸汽机之前,离心力调速器已经在风车上被大量应用。风车技术人员开发了许多新装置,不过他们大多是工程师不是科学家,因此除了简略的专利,留下的文献纪录很少。图12中是Thomas Mead1787年申请的控制风车速度的调节器专利中的一张图,可以看到采用了一个双球的离心力调节器。

图12 1787年Thomas Mead申请了一个控制风车速度的调节器专利
然后是瓦特蒸汽机登场,瓦特对蒸汽机的改进始于1763年,当时他在格拉斯哥大学(University of Glasgow)几位教授的帮助下,在大学里开设了一间小修理店,这年,他修理了学校的一台纽科门蒸汽机(Newcomen steam engine),但当时蒸汽机的效率很低。此后,瓦特对蒸汽机进行了一系列重大改进:如将冷凝器与汽缸分离、采用连续旋转运动的曲柄传动系统、发明了双向气缸、平行运动连杆机构等。1788年瓦特从其合伙人博尔顿(Matthew Boulton)处了解到已经在风车中采用的飞球调速器,意识到可以改进后用到蒸汽机的转速控制,以保证蒸汽机的平稳运行,于是发明了采用飞球调速器的蒸汽机。
蒸汽机的出现开辟了人类利用能源的新时代,使人类实现了机器大生产。后人为了纪念瓦特这位伟大的发明家,把功率的单位定为“瓦特”。
到1868年,约有75000台Watt governor在英国使用。最初的Watt governor存在的主要问题是:只能在一个运行条件上实现精确控制,即只能在小(负载变化)范围运行。用现在的话说,就是当负载(外扰)变化较大时,控制存在稳态偏差。
瓦特调速器只采用了比例控制,我们采用如下的一个简化模型描述其工作过程:
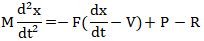
其中:P为驱动力矩,R为负载力矩,V为设定转速,实际转速为dx/dt,F为反馈增益系数,t为时间,稳态时的速度为:
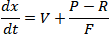
可见,系统存在与负载R(未知外扰)有关的稳态偏差。
19世纪最初的70年,大量的工作围绕改进调速器展开,很多科学家需要采用性能更好的调速器来开展各自领域的研究工作,世界各地出现了大量调速器方面的专利。比如图18的Fleeming Jenkin设计的调速器,在这个设计中,系统平衡点不再受负载外扰R的影响,但却遇到了稳定性问题。19世纪早期出现了关于调速器“hunting(来回摆动,即不稳定)”行为的报告,人们开始努力分析调速器动态特性,寻找稳定(non-hunting)的条件。

图13 Fleeming Jenkin设计的调速器
瓦特是企业家,并没有从事调速器的理论分析。
从1673年Christian Huygens,Robert Hooke直到1868年James Clerk Maxwell 一段时期控制理论的早期发展,其中对G.B.Airy(1801–1892,剑桥大学数学及天文学教授)在调速器的稳定性分析方面所做的贡献给予了特别的评价。
Airy关注调速器的速度控制问题,是因为他需要采用调速器控制望远镜以与地球旋转方向相反做补偿地速的运动,以便长时间观察某一星座。他使用调速器时发现其可能有的不稳定运动:“The machine(If I may so express myself)became perfectly wild ”(Fuller引用Airy 1840 年论文所述),并采用微分方程的工具对此进行分析。Fuller认为 Airy的研究对控制理论的贡献在于引起对控制系统中不稳定现象的关注、提示不稳定问题可以通过系统的微分方程模型来说明,是动态控制系统研究的开端。但由于他的论文写得非常简略,不能判断他当时是否得到了稳定性条件。
人们对宇宙的探索对控制理论的发展起过很大的推动作用,甚至早于牛顿运动定律发表之前,天文学家是第一批着手解决动态系统稳定性问题的人,因为他们需要精确控制大型望远镜的运动而且他们熟悉太阳系中天体运动的稳定性问题。1893年,俄罗斯数学家A.M.Lyapunov发表了他著名的关于动态系统稳定性的博士论文,建立了非线性时变系统常微分方程理论,这个研究的出发点也是为了研究行星运动的稳定性问题。现代航天工程的发展更是极大地推动了控制理论的发展。

图14 相机对准天空固定不动长时间不断拍摄的照片叠加出星轨图片
图14可以说明为什么如果想长时间观察某一星座,需要控制望远镜与地球旋转方向相反做补偿地速的运动。图14为将相机对准天空固定不动长时间不断拍摄获得的照片叠加出的星轨图片,可以感受地球运动对观星的影响;用赤道仪精确控制相机以与地球转动方向相反以地速转动并长时间不断拍摄,然后将照片进行叠加,则可呈现出肉眼很难看到的美丽的仙女座大星系。
赤道仪精确控制相机以与地球转动方向相反以地速转动并长时间不断拍摄,然后将照片进行叠加,则可呈现出肉眼很难看到的仙女座大星系
1868年,J.C.Maxwell的论文"On Governor"系统地分析了几类调速器并给出了稳定性条件,被认为是第一个系统地分析反馈控制系统的理论研究。
1868年,J.C.Maxwell(James Clerk Maxwell ,1831-1879)发表论文"On Governor",系统地分析了几类调速器并给出了稳定性条件。
上面通过方程分析Watt governor存在稳态偏差的讨论就来自Maxwell的论文,并进而对Fleeming Jenkin调速器的动态进行了如下建模:
其中P,V,R,F,dx/dt的定义同(1),G,Y,亦为反馈增益系数,W为重物产生的力矩,y为重物的运动。稳态时,调速器的速度为:
说明系统的稳态值与负载R(未知外扰)无关。但系统的稳定是有条件的,只有当
的根都具有负实部时,系统才能到达稳态。
Fuller认为麦克斯韦这篇论文的主要贡献是:
1、是系统地研究动态控制系统的第一篇论文;
2、采用了线性化技术研究运动系统的稳定性,从而通过特征方程判断系统的稳定性, 得到了三阶系统特征方程稳定的判据;
3、文中例子说明可以设计控制器即消除偏差又不致引起不稳定;
4、提出了寻找高阶系统稳定性判据的问题。
1948年维纳(Norbert Wiener,1894-1964)为他的学说取名Cybernetics就是为了向Maxwell的On Governor论文致敬,因为Cybernetics和Governor的希腊文和拉丁文是同一个含义。

图15 1948年维纳为他的学说取名Cybernetics就是为了向Maxwell的On Governor 论文致敬
当年笔者第一次读到第一篇系统地分析反馈控制系统的论文作者是Maxwell时有点被惊到了,这个麦克斯韦是那个提出著名的电磁Maxwell方程的大物理学家麦克斯韦吗?进而好奇他怎么会跑来研究控制问题的?好像是来跨界打酱油的,还竟然就一下做出个开创性的工作,弄了个第一。
根据Mayr介绍,在蒸汽机时代,调速器的精度和稳定性问题是一个时髦的问题,困恼了当时的很多科学家和发明家,好像麦克斯韦做这个研究只是追逐了一下热点。
但笔者觉得另外几个原因更顺理成章:1863年,作为英国科学促进协会电气标准委员会(British Association for the Advancement of Science committee on electrical standards)的成员,Maxwell和H.C.Fleeming Jenkin一起进行了确定电学标准的实验工作,实验中需要控制其中的一个圆形线圈以匀速转动,就用到了Fleeming Jenkin设计的调速器,Maxwell对此印象深刻。另一方面,更早的时候,1857年, Maxwell曾以"On the stability of the motion of Saturn's Rings" 获得过Adams Prize,他通过把土星环的微分方程线性化,得到一个4阶特征方程,从而可以分析其稳定性。所以他对稳定性问题既有知识储备和积累,又对调速器有直接的了解。
Maxwell没有进一步得到更高阶特征方程的根都具有负实部的充要条件,他更大的兴趣还是在电磁学方面,Fuller甚至认为Maxwell写"On Governor"这篇论文就是为了可以让自己从控制问题中脱身,从而专心于电磁学的工作。
但他把确定高阶特征方程的根都具有负实部的充要条件这一问题明确地提了出来,希望得到数学家的关注。在科学的发展中,准确地提出问题和解决问题同样重要。
麦克斯韦提出的问题被他剑桥大学三一学院校友劳斯(E.J.Routh, 1831-1907, English mathematician)解决(1854年,劳斯与麦克斯韦以第一和第二的成绩毕业于剑桥)。
1877年,E.J.Routh得到特征方程所有根都有负实部的多项式系数条件,Adolf Hurwitz(1859-1919, German(Swiss)mathematician)1895年也独立地推出了这个判据,因而并称Routh-Hurwitz判据。
1877年Adams Prize(麦克斯韦为评奖委员会委员)的主题是the criterion of dynamical stability,劳斯获得了此奖,他解决了Maxwell提出的判断所有根都有负实部的多项式系数条件。
当时解决这个问题的代数工具已经被Augustin-Louis Cauchy,Charles Sturm和C. Hermite等人建立起来,Routh综合运用这些结果得到了动态系统稳定性理论。
虽然麦克斯韦和劳斯对调速器稳定性分析的结果可能并没有对具体改进离心力调速器的设计起到直接作用,但对控制科学有很大贡献,线性化技术与特征方程分析至今仍是控制系统稳定性分析的一个重要手段。
19世纪后半叶-20世纪初, 反馈控制器被大量应用,1911年,Elmer Sperry发明带有PID控制的船的自动驾驶仪,1922年,Nicholas Minorsky通过分析船的自动驾驶问题,推导出了我们现在称为的三项控制器-PID(Position-Integral-Derivative)控制器形式。
19世纪后半叶至20世纪初, 反馈控制器被大量应用,包括电压、电流与频率的调节、蒸汽发电中的锅炉控制、电机的速度控制、船与飞行器的驾驶与镇定、过程工业中的温度、压力与流量控制等。
随着控制系统用于许多不同的工程领域,特别是一些复杂的机械装置,如船的自动转向装置和锅炉控制(涉及液面、汽压等多变量控制问题),控制设计问题变得突出起来,这时存在的主要问题有:缺乏通用语言来从理论上理解动态系统的控制问题,缺乏简单的、容易运用的分析与设计方法。
唯一可用的分析工具似乎只是微分方程和当时还不太广为人知的Routh-Hurwitz稳定性判据,但应用这个判据需要获取系统参数值,而且难以具体指导如何设计出使系统稳定的控制器。
一些聪明的工程师如Elmer Sperry(1860-1930,American inventor and entrepreneur)敏锐地注意到人进行控制调整时不是简单地采用开关控制(on-off approach),而是综合运用了预测、当被控量接近目标值时撤出控制、以及当存在持续的偏差时进行小量的慢慢调节等方法,于1911年设计出了采用较为复杂控制律-PID控制结合自动增益调整的船的自动驾驶仪,被认为是最早发明的PID控制器。
1922年,Nicholas Minorsky(1885-1970,Russian American engineer and applied scientist)从理论上清晰地分析了船的自动驾驶问题,推导出了我们现在称为的三项控制器-PID控制器形式。
PID是迄今为止应用最广泛的一种控制方法,目前95%以上的过程控制迴路和90%以上航空航天控制迴路还都是基于PID控制。2017年国际自动控制联合会(IFAC)的工业委员会对工业技术现状进行了调查,在十几种控制方法中, PID以百分之百好评(零差评)的绝对优势居于榜首。
其实PID控制器的结构非常简单,就是系统偏差的”比例-积分-微分”三项线性反馈结构之和。实际系统几乎都是非线性的,而且不确定性普遍存在于实际系统的建模与运行之中,那么简单的线性结构的PID控制为什么能在实际中广泛应用于非线性不确定系统,它的理论基础是什么?再就是虽然PID只有三个参数,但至今PID调参方法已有上千种,都是经验公式,而工程界依然认为实际中的大部分PID控制回路并没有调整在好的工作状态,那么如何调整才能实现满意的效果?

图16 PID 控制器:系统偏差的”比例-积分-微分”线性反馈结构
这些可以说是控制理论中最基本的问题,一百多年来一直没能从理论上给以很好回答。这一问题近年获得一些突破性进展,对PID控制的广泛性给出了理论回答,而通过研究某种自抗扰控制(ADRC*注1)的具体形式与PID控制的内在联系,一种可使PID具有自抗扰能力的新的定量调参方法被进一步提出来,新的PID调参方法是由ADRC启发而来,并不是直观容易想到的,但其物理功能却比原PID的三个参数更明确而易于整定。
启发PID调参新方法")
图17 自抗扰控制(ADRC)启发PID调参新方法
*注1:自抗扰控制(ADRC)由中国科学院系统科学研究所韩京清研究员于上世纪80-90年代提出,正式发表于1998年,作为在PID控制基础上的创新,其强大的鲁棒性和突出的瞬态响应性能,吸引着越来越多的关注,已发展为一种可解决具有大范围及复杂结构不确定系统控制问题的有效方法。
作者:黄一(中国科学院)
相关阅读
◆黄一教授讲控制历史(下)







