【Q1】生产过程中整定PID,如何避免或者减少对装置产生的安全风险?
【A】:在整定过程中,为什么会说有风险?是因为在化工装置里,由于我们不合理的使用参数,实质上会导致过多的使用控制资产或者调节阀的动作,然后引起整个系统波动。
第一,整定方法科学化。
在整个的整定过程中,需要工程师通过不断地实验,在装置上经历很多事情才能形成一定的知识储备。
第二,在操作工旁边整定。
所有的整定工作都意味着对生产过程中的影响和干预。这个影响和干预实质上是需要对装置操作负责的操作工知道的。非常建议大家在操作工旁边整定,向其说明你要操作的步骤,操作工会对你做的事情有一个预估并了解整定过程中可能存在的风险与因果关系,这件事情非常重要。
第三,分析做好记录。
要对工艺过程进行分析,尝试去理解,努力去找到问题的根源,然后才进行整定,也是希望能够有一个很好的交付,实际上是一个系统化的工作。
第四,PID控制输出限幅。
当使用Lambda整定方法的时候,算出的参数和原参数会有非常大的变化。例如,一回路的积分时间是5秒,此设置不合适,需要改成300秒。从5秒到300秒,存在60倍的差距,对于如此大的差距,如果做出错误的结论,可能会导致风险。某厂压缩机比例度本来是从90改成45,结果改成了4,由于比例度大幅度变化,会导致系统震荡以后,压缩机它反应很快,有些紧急停车系统就因为波动异常而停车。
防止该现象最有效的办法就是要对装置充满敬意,同时自己要非常小心和谨慎,即在最开始大幅度修改参数之前,我们至少要对控制器的输出做一个限幅,万一参数不对,控制器的输出不会有大幅度的偏离当前工作点的一个状况发生。当我们修改完参数,发现整个的控制器的输出在我们想象中的范围里,我们可以逐渐的把限幅放开。
【Q2】:PID参数整定的实质到底是什么?
【A】:在PID控制器形式确定的情况下,被控对象的特征也是确定的,那么现在能不能找一组参数?在现有形式结构情况下,设计出一个控制器,让它和被控对象组成一个新的系统,组成一个整体,他们整体的响应能够达到我们的预期,能够实现期望的闭环性能。
如果现有的控制器通过调整参数,整个系统还是实现不了我们想要的闭环性能意味着什么?意味着,现在靠单一的PID可能不行,也许是控制方案重新设计才是对的,这是问题的关键。
【Q3】:调整的规律及注意事项有哪些?
【A】:总体、要求、方法、过程、经验
控制方案很重要,回路整定要搞好。
比例积分作用大,特况再把微分加。
既要跟踪又抗扰,控制强度不能小。
要想超调无振荡,控制作用切勿强。
自衡对象积分定,比例作用适当动。
非衡对象积分弱,比例作用不能过。
开环测试定模型,控制参数公式定。
方法虽好干扰多,闭环阶跃不可缺。
手动不稳有外扰,自动振荡内部找。
同相振荡比例降,异相振荡积分削。
【Q4】:在做温度控制PID整定的时候,用Lambda整定,怎么能够比较准确的从响应曲线去对K 、T、 τ 取值?
【A】:第一,K只和稳态相关容易计算。
通过响应曲线,把被控对象的所有特征取到,其中最主要特征叫做增益K 、等效时间常数T、等效纯滞后τ。其中增益K只和稳态有关系。和稳态有关系,以后就比较容易计算。整个PV值的稳态变化和OP值的稳态变化的比值就能够计算出K,K值是非常准确和确定的。
第二,T+τ很重要。
T+τ的总和决定了被控对象的主特征。通过PV值变化63.2%的这个点和初始点来确定T+τ。确定T+τ后,就要决定总和里前面第一段τ,与后一段T。

T与τ如何切割才能达到我们预期的性能呢?我们发现只要纯滞后,不要被低估,把纯滞后估的稍微大一点,最终得到的KT是能够使用的。(举下例说明便于理解)
有一个对象,这个对象有一个5秒的纯滞后,它的时间常数是25秒。尝试对它进行控制。其实,最准确的估值是知道纯滞后与时间常数分别是多少,那么就是标称对象,即时间常数为25秒(如图红色线)

在T+τ=30,重新估计,纯滞后是10秒,时间常数为20秒,得到如图绿色线。
在T+τ=30,再重新估计,纯滞后是20秒,时间常数为10秒,得到如图蓝色线。
在T+τ=30,再重新估计,纯滞后是25秒,时间常数为5秒,得到如图黄色线。
其实,当T+τ确定以后,只要按照高估纯滞后的原则,总能够得到一个PID参数,能够对它进行稳定控制。当我们取得对象有偏差的时候,它也可以进行稳定的控制。这是每一组PID都可以实现对被控对象的控制,这个响应的特性会有变化,但是总的来说都是有超调,只有一个超调就可以稳定的过来。这既是PID的能力,也与我们如何看待被控对象和PID有关系。
第三,不能低估τ。
【Q5】:串级控制,主副回路的PID参数如何整定?有先后顺序吗?
【A】:对于PID的串级控制来说,应攘外必先安内,二人同心其利断金(先内后外、内快外慢、内平外动、内外交错)。
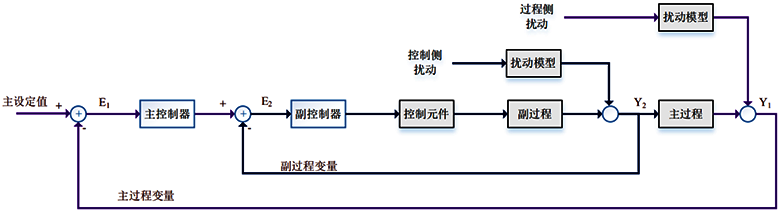
首先让副回路手动,那么主回路必然是手动的,因为它不能工作,做了测试后会得到一个模型,基于该模型,我们用Lambda方法会得到一个副回路的控制器参数,让其投串级。当把副回路投串级后,可以在主回路的输出上通过改变输出,借此影响副回路设定值,影响回路的工作,最终影响主回路的输出。
我们在主回路手动,副回路打串级模式的情况下,在主回路的设定输出上做一个阶跃测试,会得到一个广义的模型。该模型是进行主控制器参数整定的过程。一定要按照顺序,按照正确的过程来整定,把它理解成一个单回路即可。
【Q6】:PID与APC区别?
【A】:

【Q7】:对于大滞后系统,滞后到什么程度,不适合用PID?
【A】:其实不存在任何关于PID适用范围的说法,低阶对象PID普遍适用,和滞后无关。如果这个对象是一个低阶对象,简单说,是一个一阶对象,使用PID一定是最优的,因为一个两参数模型只需要两参数就够了,如果是三参数模型,使用三个参数就可以实现最优了,如果对象是高阶的,使用高阶的模型才有可能获得收益。
【Q8】:如何对控制回路中的各参数进行修正,必须通过曲线图观察,然后不断整定吗?
【A】:整定方法是三步走,并不光是看曲线。通过开环的测试,能够得到被控对象的模型,再利用模型和目标来确定出PID参数(基本上都是两参数:比例和积分时间)。把此参数算出后,放到系统里面去修改,再测试。一般情况下,计算得到的PID参数和原参数会有非常大的差别。若在第一个环节出错,会导致最终的控制性能不理想,此时,需要准确地辨别被控对象的控制模型。有的可以简化到使用默认参数,但从方法上来说,是用三步的方法,也就是用Lambda整定方法。
【Q9】:PID参数整定的方法试凑法有什么弊端?
【A】:第一,慢。在实际工作过程中,当你使用试凑的方法的话,最主要的工作是慢;第二,工程师要求高。理论知识不够扎实,同时还需要更多的经验积累和不断摸索;第三,知识碎片化不可传承。具有能力但却无法将其系统化地传授给他人,经验的不可复制与不可推广给整个行业带来了很大的弊端。
【Q10】:调节阀首次安装上电后,PID如何整定,最节省时间?
【A】:一般来说,在刚开始的时候开环做一次测试,是最简单,最快的确定一个对象特征的一个方法。如果来不及做,那就把压力和温度重点去做测试,其他的先给个初始值,用算的或者默认值设置,回头再一个个去看。
总之,PID整定在工业控制领域中具有非常重要的地位。通过科学合理的PID整定,可以提高系统的控制精度和稳定性,从而提高生产效率,降低能耗,减少生产成本,提高产品质量,为工业生产带来更多的益处。






