一般来说,火电厂高加和低加系统都采用单回路调节,通常选用单回路PID调节器。在不考虑系统耦合的情况下,它们是火电厂最简单的自动调节系统了。调节原理框图如1所示。

图1 单回路调节原理框图
20世纪90年代以前,国内的调节系统都采用单元组合式仪表,也就是说有比例调节器,有积分调节器。如果使用无差调节的话,需要使用两个调节器:比例和积分调节器。这种情况下,尽可能使用少的调节功能就比较重要。一方面节省了费用,另一方面节省了宝贵的空间-当时几乎所有控制测量设备都很庞大,控制间一般都比较拥挤。所以这个时候,高低加调节系统都采用纯比例调节。也有的电厂感觉高加系统更加重要,就把高加系统也加上了积分调节器。
20世纪90年代左右,国内引进了组件式控制系统,叫MZ-Ⅲ型组件控制系统。目前许多教科书在讲述自动调节系统的时候,还大量用MZ-Ⅲ作为基础来讲述控制策略。
这个系统的调节器功能多了,既有单独的比例、积分、微分调节器,又有组合了比例积分、比例微分、比例积分微分的调节器,可以不用过多考虑空间限制了。可是该组件故障率较高,即使是多功能调节器,也是把比例、积分、微分三种功能叠加到一个调节器内部,所以故障率还是有的,购买成本还是偏高的。所以当时也有纯比例调节系统的存在。
后来,国内电厂掀起大规模的DCS改造和应用风潮。对于DCS来说,增加一个积分运算功能不涉及到任何费用,并且DCS内每个调节器一般都要加上比例积分作用,就看用户愿不愿意使用了。那么在使用积分不会带来费用和空间问题的情况下,纯比例作用渐渐要绝迹了。
但是对于积分作用的应用,理论上还有必要搞清楚一个概念:自平衡能力。
2、自平衡能力
还是前面说的那个水池。上面一个进水管,下面一个出水管(见图2),如果进水管流量增大一些,水池水位会增高,导致出水口压力增大,出水阀前后差压增大,出水流量也增大,一直增大到进出水流量相等,水位在新的高度不再变化。这说明这个水池不需要经过调节,水位就可以自动稳定在一个水平。我们说:这个水池具有自平衡调节能力。


图2 水池液位有自平衡能力 图3 水池液位无自平衡能力
还是这个水池。如果把排水阀换成了水泵(图3),当进水流量做一次改变的时候,不管入口压力多大,泵的出水量高始终不变化,那么水池的水位会一直改变下去。很简单,这个水池没有自平衡能力。
那么自平衡能力有什么用处呢? 我们来看:当进水阀开大后,流量增加,水位升高。调节器调节使得出水泵开大,让水位降低。当出水泵开到一定地步,进出口流量相等的时候,水位保持平衡。可是这个时候因为积分的存在,积分使得泵以最大的速度继续开大,一直到水位等于设定值泵的流量才停止变化。而此时,出口流量又远大于进口流量,故此水位不能稳定,形成震荡。
这个描述存在如下两个问题:
①积分的速度与积分参数和输入偏差有关。进出口流量相等的时候不是水位偏差最大的时候,而是水位略微有所回调。所以此时泵的改变速度不是最大。
②如果比例积分设置参数合适,这个系统是个逐渐收敛的过程。在手动状态下,出水流量通过增加一降低的反复调节,最终水位可以稳定在任何一个值,而不是某一个特定值。那么比例、积分作用使得出水流量的反复波动,最终应该可以稳定,并且实现无差。
所以,实际上,不管有无自平衡能力,都可以使用积分作用。只是有自平衡能力的调节对象的参数更容易整定,调节更容易稳定。
3、随动调节系统
有人曾经提过:电厂有一种随动调节系统,也就是自动投入时候只要在正常水位范围内,可以稳定在任何一个定值。要实现这个功能很简单,就是去掉积分作用,用纯比例调节。因为纯比例调节没有消除静态偏差的功能,当然可以稳定在任何一个值了。
对于与随动调节系统,应该还有一种方式:设定值是经常变动的。这样的系统很多:火电厂的滑压运行方式,这个滑压就是压力需要平滑的波动,其设定值就应该是个波动的函数。还有在中调控制下的机炉协调(专业术语叫做AGC)、的机组负荷设定值,应该也算是经常变动的。
电力行业之外,这种系统也很多。比如管道焊接中,为了消除热应力,需要对焊接点进行控制下降温度法,这个控制下降的温度设定值,就应该是经常变化的,甚至是用时间函数来确定的。
从这个意义上讲,设定值常变,有三种情况:
①随便让它变,不加控制;
②加以控制,根据时间或者其他情况,对设定值做有规律的修改;
③设定值是受其他因素控制的函数计算值。
4、高低加水位调节系统耦合的解决办法
昌晖仪表之所以专门介绍高低加水位调节系统,就是因为系统之间存在着耦合,而且这种状况在电厂中非常普遍。图3是一个电厂的低加系统耦合情况示意图。
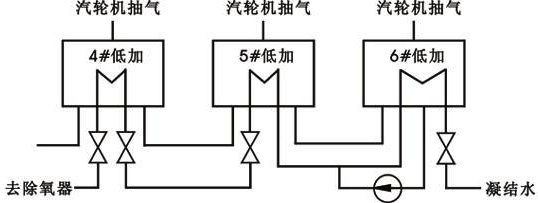
图3 低加系统耦合情况示意图
4#低加的凝结水流入5#低加,5#低加的凝结水流入6#低加。对于4#低加来说,自动投入很简单,没有耦合,用一个简单的单回路调节系统足可以了。可是对于5#低加来说就不太好,因为它要接受4#低加来的凝结水。在有的系统中,上一级低加来的凝结水流量波动不太大,对本系统干扰不大。而如果上一级来的流量波动大,足以大幅度影响本系统的水位的时候,就必须要关注系统耦合了。
解决的办法前面已经说过,加一个前馈。可以对4#低加的输出增加一个流量测点。然后把此流量信号作为本系统的前馈。可是增加流量测点涉及到安装问题。如果用流量孔板测量,需要寻找一个数米长的直管段,拥挤的汽机空间不一定能够找到这么一个直管段;还需要投入一定的费用购买流量孔板和变送器。所以许多厂矿没有流量测量装置。那么,我们可以让4#低加输水的执行器反馈作为5#低加水位的前馈信号,控制策略原理框图如图4所示。
也有人会说:前馈信号到底带来多大干扰时,需要对干扰情况进行调节呢?这个问题在副调的PID调节器内就可以解决,也就是修改比例带的大小。不过也有很多人倾向于给副调的测量值加上一个系数,也可以。控制策略原理框图如图4所示。
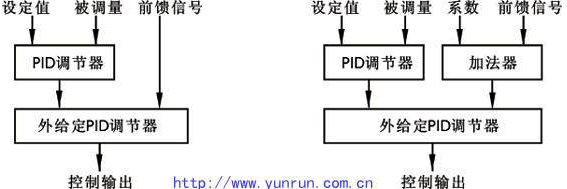
图4 高低加水位自动串级调节系统
5、几个问题
①为什么要用串级调节,而不能用单PID,在单PID的输出叠加前馈信号?
因为跟踪不好实现。具体道理,在本站比例、积分、微分综合整定里面已经说过。
②如何设定死区?
前面讲过,死区的设置可以有效避免执行器的动作次数,提高执行器的寿命。但是死区设置过大,不但会影响调节系统的调节精度,而且会造成调节滞后,影响系统稳定性。图6就是死区过大影响系统稳定性的例子。
那么,死区设置多少合适呢?一般来说,对于高低加系统,其总量程都在1000-2000mm之间,可以在设定值±(10~20)mm之内不运算。那么死区可以设置为:(10~20)/(1000~2000)=0.5%-2%。在一般的PID调节器内,死区往往是百分量。所以就可以省略地写为0.5-2。如果实际整定过程中,还发现死区过大,可以设置更小。
③那么怎么判断调节系统是因为死区过大造成的不稳定?
很容易。我们可以观察被调量和输出的曲线。当死区存在的时候,输入偏差在死区以内,调节器的输出曲线是一条水平的直线。如果系统不稳定,并且水平直线过长,就可以判定为死区过大。
当被调量开始回调的时候,输出也跟着回调。可是回调到一定的地步,输出不变了,为什么?死区的存在所致。如果系统不能稳定,死区过大,死区的存在导致回调滞后,下一个回调的波峰推迟出现。如果系统能够稳定且波动较小,说明死区设置合理。合理的死区几乎不会造成回调滞后。
引起调节滞后的原因有很多种,最主要的是积分时间过小和死区过大。要注意二者之间的区别。
6、偏差报警与偏差切除
我们设计自动调节系统,目的就是为了让系统能够安全稳定运行。为防止出现意外,必须要有一个偏差报警和保护功能。
现在的调节系统已经比较完善,在调节器内往往都有偏差保护功能。所谓的偏差保护,就是当调节器的输入偏差达到一定值的时候,要把自动切换到手动状态的功能。
如果调节器内没有这个功能,就需要在控制策略中添加该功能。除了被调量与设定值的偏差保护外,还有一个输出与反馈的偏差保护功能:当调节器的输出与执行机构的反馈达到一定值的时候,说明执行机构出现了故障,要么执行机构误动,要么拒动,或者反馈故障。发生这样的异常,也必须要把系统切除到手动状态。
切除到手动状态,一方面是保护系统不致出更大的问题;另一方面是提醒运行操作员,系统出现故障,需要手动干预;同时需要检查系统,消除缺陷。






