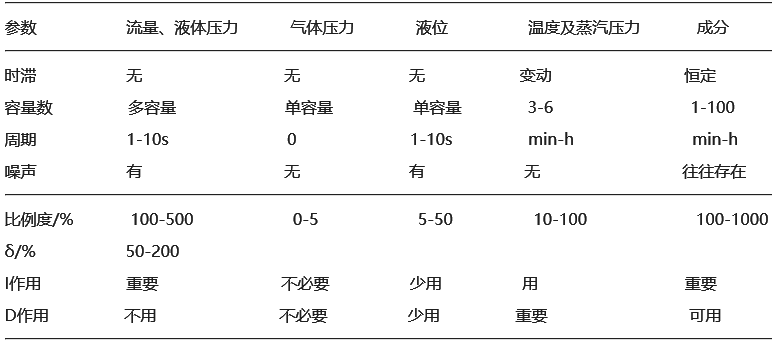
常见控制系统的过程特点及调节器参数范围
常用的工程整定方法是对系统加入适当的外作用,即对给定值作些变动或者施加一些干扰然后通过观察过渡过程曲线,在取得相关数据的基础上,对调节器的参数进行整定。有的仪表工会问在现场使用的控制系统中,影响控制过程的因素不应该是给定值的变化,而是外界的干扰或对象参数变化在起作用。这两种情况对过渡过程的影响结果如何呢?理论证明两种情况的稳定程度是一样的,衰减比和周期也是一样的。而干扰作用和给定作用对过程有不同的影响,但并没有改变过渡过程的本质。这就是工程参数整定方法普遍适用的原因。






