1、负正负回原点模式原理
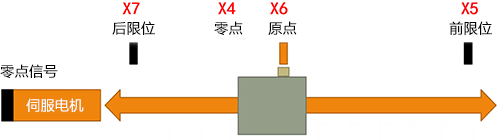
“负正负”回原点模式,顾名思义,是指执行机构先向一个方向(通常是负方向,即远离原点方向)移动一小段距离,然后迅速反转方向(正方向,即朝向原点方向)。直至触碰到原点限位开关,最后再反方向移动一小段距离以确认原点位置,最终停止于一个精确的位置。这种策略能够有效避免因机械惯性、磨损或外界干扰导致的原点定位误差。

2、负正负回原点模式实现步骤
①初始设定
首先,在PLC程序中设置原点限位开关的输入地址,并确定回原点过程中的移动速度和加速度参数。
②负向移动
向PLC发送指令,使执行机构以预定速度向负方向移动一小段预设距离。这个距离需要足够远,以确保能够脱离任何可能的干扰区域,但又不能过长以免造成不必要的耗时和能耗。
③停止并反向
当执行机构移动到预定位置后,立即停止并反向移动,向正方向(原点方向)加速前进。
④检测原点
持续监测原点限位开关的状态。一旦开关被触发,表明执行机构已接近原点位置。
⑤确认原点
为确保准确性,再次反向移动一小段距离(称为“回退”),然后停止。这个回退动作可以帮助消除因触碰限位开关时产生的微小过冲或抖动,提高原点定位的精度。
⑥定位完成
最终,执行机构停止在精确的原点位置,等待下一个控制指令。

3、负正负回原点模式优点与适应性
①通用性强
该模式不依赖于特定的PLC型号或伺服系统,只要具备基本的输入输出控制和运动控制功能,即可实现。
②灵活性高
通过调整移动速度、加速度和回退距离等参数,可以适应不同机器和工况的需求。
③可靠性强
通过负向预移和正向回退两个动作,有效降低了因外界因素导致的原点定位误差。
4、结论
这种负正负回原点模式虽然具有一定的通用性,但在实际应用中,还需要根据具体的设备型号和工艺要求进行调整。学习和掌握这种模式可以帮助电工更好地理解和应用PLC和伺服系统的控制。






