本文主要针对爱普生4轴机器人如何建立工具坐标系及其验证进行详细阐述。
1、建立与机器人之间的通信:通过EPSON RC+软件,点击设置>>电脑与控制器通信,实现PC与机器人之间的通信,这里可以采用USB或者以太网通信。

2、打开工具向导:通过EPSON RC+软件,点击工具>>机器人管理器>>工具>>工具向导,打开工具向导。

3、选择工具编号:这里可以选择一个需要创建的工具编号,本例为工具1。

4、爱普生4轴机器人建立工具坐标系示教第一个参考点:直接点击示教即可。

5、工具向导,爱普生4轴机器人建立工具坐标系示教参考点1:在步进示教界面,控制U轴为0°,接着再控制XY,将工具的中心对准特征点,完成后点击示教按钮。

6、爱普生4轴机器人建立工具坐标系示教第二个参考点:直接点击示教即可。

7、工具向导,爱普生4轴机器人建立工具坐标系示教参考点2:在步进示教界面,控制U轴为180°,如果由于机械原因,旋转不了180°也没关系,接着再控制XY,将工具的中心对准特征点,完成后点击示教按钮。

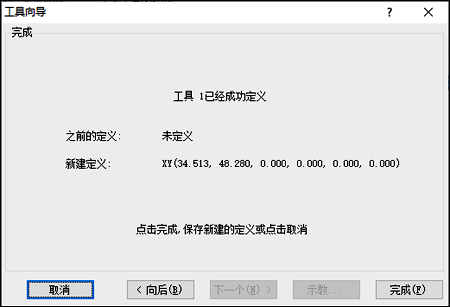
8、爱普生4轴机器人建立工具坐标系示教完成。
9、爱普生4轴机器人建立工具坐标系示教完成后,需要进行验证,在步进示教界面,切换Tool为刚刚示教的工具1,然后旋转U轴,观察工具的中心是否始终对准特征点,如果始终对准,说明该工具可用,如果存在偏移,说明需要重新创建工具。







